Molti mi chiedono un consiglio per allestire un multicottero, non sono il maggior esperto nel campo, ma possiamo fare un ragionamento insieme:
CONFIGURAZIONE
Possimo avere 3 4 6 od 8 motori.
I Tricotteri sono stati molto popolari qualche anno fà perchè potevano essere costruiti usando 4 giroscopo da elicottero, e questo li rendeva molto economici.

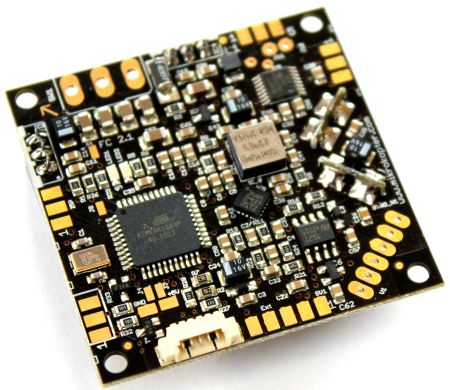
Oggi le schede di controllo che si trovano sono enormemente superiori e molto più economiche.
Hanno il grosso difetto del motore di coda che deve essere ruotato, non è facile creare lo snodo senza gioco.
Lo snodo ed il servo relativo sono sollecitati sia l'effetto giroscopico dell'elica, sia in caso di crash, dove l'inerzia del motore si scarica tutta sul povero servo.
In tricotteri piccoli ho notato una tendenza del motore di coda, oltre a controllare l'imbardata a far spostare di fianco il modello.
Se vi state dirigendo su un muro, virate per evitarlo ma il motore di coda oltre a far imbardare il modello do fà "scivolare" verso il muro!
Lo sconsiglio, a meno che vi piacci proprio la configurazione, il risparmio economico di un motore in meno è minimo.
Quadricottero, lo standard ed il più consigliato, molto facile da costruire e quindi anche riparare.

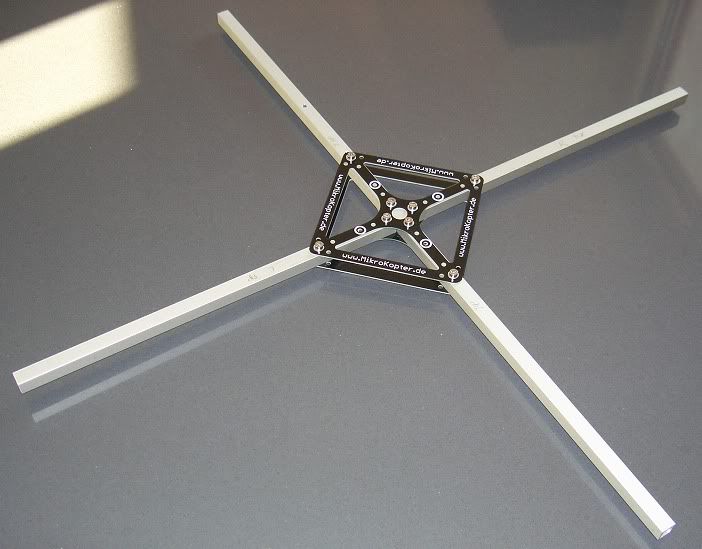
Basta un quadrello di alluminio tagliato e forato a misura per le braccia ed un supporto centrale fatto con un pezzo di compensato, vetronite o carbonio.
Si comporta bene in volo.
Unico difetto è che non sono proprio macchine da carico!
Si possono costruire a "+" od ad "X".
Il "+" è più facile per l'orientamento specie colorando tutto il braccio di coda od usando led,
L'"X" ha il vantaggio che non ha un motore sul muso se si vuole montare una telecamera.
Esacotteri ed octocotteri hanno un solo scopo, PAYLOAD.

Aumentando i motori aumenta il carico utile a scapito di complicare la macchina ed aumentare gli assorbimenti.
Attenzione che non tutte le configurazioni sono supportate, mi è capitato scprire che per esempio la KK non gestisce un esacottero che non abbia un motore frontale.
In pratica vuole i motori alle ore 12-2-4-6-8-10 mentre io avevo fatto il telaoo con i motri alle 1-3-5-7-9-11 (ho risolto ma non è il caso di spiegarvi quì come)
Esacotteri ed octocotteri possono avere tutti i motori su un solo piano a stella o coppie coassiali.


Nel primo caso bisogna aumenta il diametro per fare entrare tutte le eliche.
Nel secondo la struttura è più snella, si hanno la metà dei bracci ma i motori inferiori hanno le eliche pericolosamente vicino al terreno ed in atterraggio è facile urtarlo!
Se è il primo multicottero che allestite vi consiglio vivamente il Quadricottero, avrete già molti problemi da superare, non complicatevi la vita per ora.
La lunghezza delle braccia cambia il comportamento del modello, braccia corte un modello reattivo, lunghe più stabile.
In generale per modelli normali si tende a mantenere la distanza tra un motore e quello opposto tra i 400mm ed i 600mm.
Per i primi modelli meglio tenersi larghi per avere un comportamento docile.
Attenzione che le eliche che volete usare non si colpiscano a vicenda specie per i 6 ed 8 motori! (ci sono cascato anche io)
MOTORI ED ELICHE
Potremmo farci ora calcoli matematici per determinare che motore scegliere, ma io preferisco copiare il lavoro degli altri e partire da configurazioni che sono sicuro volino.
Il discorso che segue vale per i Quad ma può essere facilmente adattata a tutte le configurazioni.
Diciamo che con 4 motori ci sono 4 diverse configurazioni..
I primi sono i micro con eliche da 6", i secondi i compatti con eliche da 8", poi lo standard con le 10"EPP, per passare ai "pesanti" con le 12" o le 10" (non le EPP ma più toste) alimentate 4S.
Le classi me le sono inventate io ora, non andate a chedere un quad pesante che nessuno capirà cosa intendete.
Tralasciamo i micro, che non hanno alcun vantaggio, sono solo carini, ma sono complessi, critici e difficli.
Se non sapete come farli vuol dire che non siete pronti ai micro! ;)

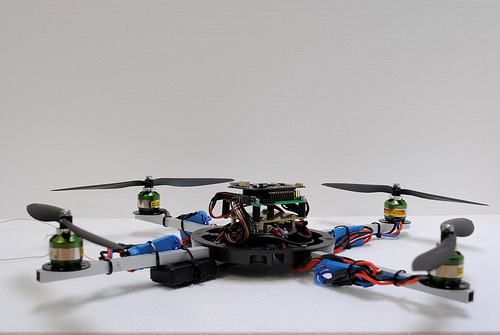
I medi sono tipo il Gaui, girano con lipo 3S da 1500mA/h o 2000mA/h pesano intorno ai 700/800gr.
Possono portare in volo una piccola telecamera tipo FCO ma non di più.
In volo un assorbimento grossomodo di 10A ma, a tutto motore ovviamente è più alto, possimo ipotizzare un 8A di picco ogni motore (totale 4x8=32A).
Questo ci fornisce i dati che ci interessano, un motore che tira una 8x4 alimentato 3S con 8A di picco
Motri tipo Roxxy2815 campanellini cinesi tipo il TowerPro TP2409-18, in generale tra 900Kv e 1100Kv (Se alimentati 3S con una 8x4.5 assorbono 8A vanno bene)
Regolatori da 10A (vedremo dopo il tipo)
Eliche EPP 8x4.5 (ovviamente 2 coppie destra e controrotante)
Per gli standard, passiamo a lipo 3S da 2200mA/h a 3000mA/h perso da 800g ad 1.2kg.
Il mikrokopter L rientra in questa taglia.
Può portare in volo una compatta da 200/400gr
In volo avremmo assorbimenti grossomodo di 15/20A, ma i singoli motori avranno un 12/15A di picco ognuno.
Quindi motori da 900kV a 1100KV che gestiscono una 10x4.5 alimentati 3S con 12/15A per esempio un Roxxy 2824-34
Regolatori da 18A
Eliche EPP10x4.5 (ovviamente 2 coppie destra e controrotante)
Per i pesanti, passiamo a lipo 3S ma spesso una 4S oltre 3000mA/h perso da 1.5kg fino a 2 3kg.

Può portare in volo una reflex od una handycam da 700/1000gr
In volo avremmo assorbimenti sui 20A ma anche superiori per ogni motore.
Per i motori si inizia a fare sul serio con motori da meno di 900Kv che gestiscono 120/150W per esempio un ROXXY 2827-35
Regolatori da 20A o più.
Eliche 10x4.5 se alimentato 4S o 12x4.5 se alimentato 3S, meglio se non le EPP, ma qualcosa di più solido.
Queste iniziano ad essere macchine serie con cui si possono fare riprese professionali, ma che hanno una serie di difficoltà di gestione per cui le sconsiglio come prima macchina.
Come avrete capito se state allestendo il vostro primo quad meglio puntare allo standard od al massimo ad un medio.
Se il vostro fine è una macchina da lavoro, fatevi le ossa su uno standard, sbattere a terra una macchina "pesante" oltre a costare parecchio in euro è pericoloso!
Per i multicotteri vale la stessa regola degli eli o aerei, più è grosso meglio vola, quindi a parità tra medio e standard io farei lo standard.
CONFIGURAZIONE
Possimo avere 3 4 6 od 8 motori.
I Tricotteri sono stati molto popolari qualche anno fà perchè potevano essere costruiti usando 4 giroscopo da elicottero, e questo li rendeva molto economici.
Oggi le schede di controllo che si trovano sono enormemente superiori e molto più economiche.
Hanno il grosso difetto del motore di coda che deve essere ruotato, non è facile creare lo snodo senza gioco.
Lo snodo ed il servo relativo sono sollecitati sia l'effetto giroscopico dell'elica, sia in caso di crash, dove l'inerzia del motore si scarica tutta sul povero servo.
In tricotteri piccoli ho notato una tendenza del motore di coda, oltre a controllare l'imbardata a far spostare di fianco il modello.
Se vi state dirigendo su un muro, virate per evitarlo ma il motore di coda oltre a far imbardare il modello do fà "scivolare" verso il muro!
Lo sconsiglio, a meno che vi piacci proprio la configurazione, il risparmio economico di un motore in meno è minimo.
Quadricottero, lo standard ed il più consigliato, molto facile da costruire e quindi anche riparare.
Basta un quadrello di alluminio tagliato e forato a misura per le braccia ed un supporto centrale fatto con un pezzo di compensato, vetronite o carbonio.
Si comporta bene in volo.
Unico difetto è che non sono proprio macchine da carico!
Si possono costruire a "+" od ad "X".
Il "+" è più facile per l'orientamento specie colorando tutto il braccio di coda od usando led,
L'"X" ha il vantaggio che non ha un motore sul muso se si vuole montare una telecamera.
Esacotteri ed octocotteri hanno un solo scopo, PAYLOAD.
Aumentando i motori aumenta il carico utile a scapito di complicare la macchina ed aumentare gli assorbimenti.
Attenzione che non tutte le configurazioni sono supportate, mi è capitato scprire che per esempio la KK non gestisce un esacottero che non abbia un motore frontale.
In pratica vuole i motori alle ore 12-2-4-6-8-10 mentre io avevo fatto il telaoo con i motri alle 1-3-5-7-9-11 (ho risolto ma non è il caso di spiegarvi quì come)
Esacotteri ed octocotteri possono avere tutti i motori su un solo piano a stella o coppie coassiali.
Nel primo caso bisogna aumenta il diametro per fare entrare tutte le eliche.
Nel secondo la struttura è più snella, si hanno la metà dei bracci ma i motori inferiori hanno le eliche pericolosamente vicino al terreno ed in atterraggio è facile urtarlo!
Se è il primo multicottero che allestite vi consiglio vivamente il Quadricottero, avrete già molti problemi da superare, non complicatevi la vita per ora.
La lunghezza delle braccia cambia il comportamento del modello, braccia corte un modello reattivo, lunghe più stabile.
In generale per modelli normali si tende a mantenere la distanza tra un motore e quello opposto tra i 400mm ed i 600mm.
Per i primi modelli meglio tenersi larghi per avere un comportamento docile.
Attenzione che le eliche che volete usare non si colpiscano a vicenda specie per i 6 ed 8 motori! (ci sono cascato anche io)
MOTORI ED ELICHE
Potremmo farci ora calcoli matematici per determinare che motore scegliere, ma io preferisco copiare il lavoro degli altri e partire da configurazioni che sono sicuro volino.
Il discorso che segue vale per i Quad ma può essere facilmente adattata a tutte le configurazioni.
Diciamo che con 4 motori ci sono 4 diverse configurazioni..
I primi sono i micro con eliche da 6", i secondi i compatti con eliche da 8", poi lo standard con le 10"EPP, per passare ai "pesanti" con le 12" o le 10" (non le EPP ma più toste) alimentate 4S.
Le classi me le sono inventate io ora, non andate a chedere un quad pesante che nessuno capirà cosa intendete.
Tralasciamo i micro, che non hanno alcun vantaggio, sono solo carini, ma sono complessi, critici e difficli.
Se non sapete come farli vuol dire che non siete pronti ai micro! ;)
I medi sono tipo il Gaui, girano con lipo 3S da 1500mA/h o 2000mA/h pesano intorno ai 700/800gr.
Possono portare in volo una piccola telecamera tipo FCO ma non di più.
In volo un assorbimento grossomodo di 10A ma, a tutto motore ovviamente è più alto, possimo ipotizzare un 8A di picco ogni motore (totale 4x8=32A).
Questo ci fornisce i dati che ci interessano, un motore che tira una 8x4 alimentato 3S con 8A di picco
Motri tipo Roxxy2815 campanellini cinesi tipo il TowerPro TP2409-18, in generale tra 900Kv e 1100Kv (Se alimentati 3S con una 8x4.5 assorbono 8A vanno bene)
Regolatori da 10A (vedremo dopo il tipo)
Eliche EPP 8x4.5 (ovviamente 2 coppie destra e controrotante)
Per gli standard, passiamo a lipo 3S da 2200mA/h a 3000mA/h perso da 800g ad 1.2kg.
Il mikrokopter L rientra in questa taglia.
Può portare in volo una compatta da 200/400gr
In volo avremmo assorbimenti grossomodo di 15/20A, ma i singoli motori avranno un 12/15A di picco ognuno.
Quindi motori da 900kV a 1100KV che gestiscono una 10x4.5 alimentati 3S con 12/15A per esempio un Roxxy 2824-34
Regolatori da 18A
Eliche EPP10x4.5 (ovviamente 2 coppie destra e controrotante)
Per i pesanti, passiamo a lipo 3S ma spesso una 4S oltre 3000mA/h perso da 1.5kg fino a 2 3kg.
Può portare in volo una reflex od una handycam da 700/1000gr
In volo avremmo assorbimenti sui 20A ma anche superiori per ogni motore.
Per i motori si inizia a fare sul serio con motori da meno di 900Kv che gestiscono 120/150W per esempio un ROXXY 2827-35
Regolatori da 20A o più.
Eliche 10x4.5 se alimentato 4S o 12x4.5 se alimentato 3S, meglio se non le EPP, ma qualcosa di più solido.
Queste iniziano ad essere macchine serie con cui si possono fare riprese professionali, ma che hanno una serie di difficoltà di gestione per cui le sconsiglio come prima macchina.
Come avrete capito se state allestendo il vostro primo quad meglio puntare allo standard od al massimo ad un medio.
Se il vostro fine è una macchina da lavoro, fatevi le ossa su uno standard, sbattere a terra una macchina "pesante" oltre a costare parecchio in euro è pericoloso!
Per i multicotteri vale la stessa regola degli eli o aerei, più è grosso meglio vola, quindi a parità tra medio e standard io farei lo standard.









") (Mayer)
(Mayer)

 a me da un sacco di errori per esempio frame da 2kg motori ms2814 da 770kv batteria 4s da 5000 mi da errore potenza insufficiente mentre provando al campo ho scoperto capace di alzare tranquillamente una reflex e un altro pacco batterie
a me da un sacco di errori per esempio frame da 2kg motori ms2814 da 770kv batteria 4s da 5000 mi da errore potenza insufficiente mentre provando al campo ho scoperto capace di alzare tranquillamente una reflex e un altro pacco batterie
Commenta