
- Contenuti
- Community
- Risorse
- Varie

| |
 04 agosto 20, 20:18
04 agosto 20, 20:18
| #71 (permalink) Top | |
| Sospeso Data registr.: 17-07-2016
Messaggi: 810
| Citazione:
 Ma è così difficile programmare il governor (si chiama così?) per tener fermo il coso? Ci sono dei droni che gli puoi tirare un' anguria in mezzo alla tempesta e non si spostano di un millimetro...  | |

|  |
|
05 agosto 20, 06:56
| #72 (permalink) Top | |
| User Data registr.: 16-08-2007 Residenza: Perugia
Messaggi: 3.282
| Citazione:
Claudio
__________________ "Il tempo non conta... conta quello che fai, se lo fai bene!" | |
|
| |
|
05 agosto 20, 07:07
| #73 (permalink) Top | |
| User Data registr.: 14-02-2006 Residenza: provincia VT
Messaggi: 3.672
| Citazione:
che questo e' il trainer-tipo...  Di droni ne ho sette/otto ma non ne ho mai messo in moto uno... (per quel che mi riguarda hanno il solo scopo di fornire componenti per progetti aeromodellistici...  ) )Per la programmazione, non so se possibile...all'autore la risposta... Ma se mi impegnassi con un 'aeromodello', nell'intento di farlo volare, immaginerei di passarci il tempo risolvendo questioni di aeronautica e meccanica...(più che stare ore e ore a cercare di programmare davanti al pc..) Ultima modifica di giocavik : 05 agosto 20 alle ore 07:15 | |
|
| |
|
05 agosto 20, 09:44
| #74 (permalink) Top | |
| User Data registr.: 05-01-2017 Residenza: Fossano
Messaggi: 112
| Citazione:
Concordo pienamente con la considerazione "sull'effetto vela"... una volta ben configurato è possibile che si riesca a pilotare anche con 2-3 m/s di vento, ma al momento lo eviterei!  Attendiamo con ansia altri test e ancora complimenti per il lavoro eccezionale! (la trovata della cappotta magnetica devo ricomprarmela)  | |
|
| |
|
06 agosto 20, 21:14
| #75 (permalink) Top |
| User Data registr.: 22-05-2006 Residenza: Piacenza
Messaggi: 1.547
 |
Mi fa piacere che la discussione susciti interesse e rispondo volentieri ai vari interventi. @giocavik L’idea del paracadute è interessante e soprattutto divertente. Purtroppo questo convertiplano è il modello meno adatto perché il centro di gravità, dove andrebbe fissato il cavo del paracadute, si trova nella zona del rinvio di rotazione dell’ala e quindi…il groviglio è garantito.  Inoltre credo che per rallentare la caduta verticale di un oggetto pesante 3,5 Kg. sia necessario un paracadute piuttosto grande….e non saprei quanto. Per il momento la mia intenzione rimane quella di riuscire a far volare il modello a bassa velocità (SFF) con l’ala inclinata in avanti prima di pochi gradi e salvo incidenti, aumentare gradatamente l’inclinazione e la velocità. Prima di riportare in volo l’XC-142 devo purtroppo acquistare un piccolo quadricottero per esercitarmi.  La cosa potrebbe sembrare semplice dato che su internet se ne trovano in vendita a migliaia. Però ho bisogno di un drone con radiocomando in Modo 1 e con lo stick del gas “tradizionale”; infatti molti quadricotteri moderni hanno il gas con lo zero al centro e fino ad ora, escludendo modelli costosi, non ho trovato quello che mi serve. @Clabe Il software OpenAeroVTOL, utilizza la centralina KK originariamente prodotta per i droni e che è dotata di 3 giroscopi e altrettanti accelerometri che intervengono sugli assi X,Y e Z. In pratica è possibile stabilizzare in vario modo i movimenti dell’aereo (o di un qualsiasi oggetto volante) sull’asse di rollio (Roll), di imbardata (Yaw) e di beccheggio (Pitch). Quando il mio XC-142 è in hovering, la stabilizzazione sull’asse di rollio è data da un certo valore di Autolevel (per intenderci una sorta di “Heading Hold”) che varia in ogni attimo la velocità di rotazione delle eliche principali. Se ad esempio la semiala sinistra scende, la coppia di motori di sinistra aumenta AUTOMATICAMENTE di potenza, riportando l’ala in orizzontale. La cosa sarebbe fattibile anche per un pilota in carne ed ossa ma la centralina…..lo fa molto più velocemente!  In ogni modo nonostante l’Autolevel, lo stick degli alettoni conserva la possibilità di intervenire per far muovere il modello sull’asse di rollio. Come ho già detto è come avere due piloti, uno in carne ed ossa e l’altro invisibile. Entrambi agiscono per mantenere stabile il modello ma per evitare guai…. è importante che i due si conoscano.Veniamo ora all’imbardata (Yaw), sempre con il modello in hovering. Sul mio convertiplano è controllata solo dagli alettoni che investiti dall’aria delle eliche, fanno ruotare il modello in senso orario o antiorario sull’asse verticale che passa per il baricentro. Nel volo a punto fisso il direzionale e l’elevatore non producono effetto. Dato che OpenAeroVTOL è privo di GPS, l’Autolevel sull’imbardata non è previsto e quindi la centralina fornisce soltanto un certo smorzamento (valore Yaw P) sugli alettoni che rendono il modello meno sensibile alle raffiche di vento. Il movimento degli alettoni in P.1/Hovering è dato dallo stick del direzionale. Passiamo al beccheggio (Pitch). Quando il modello è in hovering il sistema OpenAeroVTOL controlla il Pitch modulando automaticamente la potenza del rotore di coda e dei motori alari che (se i parametri di Autolevel impostati sono corretti) provvedono a mantenere la fusoliera in orizzontale. Dato che il modello deve poter salire e scendere, il pilota ha comunque la possibilità di aumentare o diminuire la potenza di tutti i motori con lo stick del gas mentre la centralina provvederà in ogni momento alla stabilizzazione sull’asse di beccheggio. Un ultimo parametro di stabilizzazione è quello sull’asse Z, che si riferisce alla salita e alla discesa verticale. Utilizzando un certo valore di Z-axis P, il sistema smorza i movimenti del modello sull’asse Z riducendo o aumentando automaticamente i giri di tutti i motori. Questa sorta di “damping” non mi è mai piaciuto ma potrebbe diventare utile all’insorgere del pericoloso Vortex Ring State, durante una discesa verticale troppo veloce. Per i coraggiosi che volessero vedere i parametri del mio XC-142, allego il file di Excel con tutti i valori che ricordo essere derivati dal modello di Ran D.St. Clair: ETTORE XC-142 - OAV V1.6 - JULY 2020.xlsx.zip A tal proposito questo è un video in cui si vede l'XC-142 dell’ingegnere americano volare veramente molto bene. Peccato che il mio modello pesi 2 chili in più.  Ciao! ettore |
|
| |
|
06 agosto 20, 23:24
| #76 (permalink) Top | |
| User Data registr.: 04-02-2005 Residenza: Milano
Messaggi: 1.342
| Citazione:
E digraziatamente il compass/mag è, ovviamente, molto sensibile ai campi magnetici... che cambiano con gli assorbimenti dei motori, e per esperienza ti assicuro che un cavo che alimenta i motori posizionato male rende ingovernabile la migliore FC... P.S. mettere insieme un quadricottero con una FC che utilizza una radio " normale " è relativamente semplice....
__________________ Se è vero che il denaro parla, l'unica cosa che gli ho sentito dire è «addio» (dal film Analisi di un delitto) Ultima modifica di sub53 : 06 agosto 20 alle ore 23:28 | |
|
| |
|
07 agosto 20, 07:01
| #77 (permalink) Top | |
| User Data registr.: 16-08-2007 Residenza: Perugia
Messaggi: 3.282
| Citazione:
I chili in piú sono sicuramente una bella differenza e probabilmente influenzano il rapporto peso potenza. Se la potenza é poca i motori possono non riuscire a vincere una stuazione di assetto critico malgrado i giroscopi. Non so quanto ti possa servire esercitarti con un drone perché quelli stanno fermi da soli e li porta anche un bimbo. Per quanto riguarda il mode 1 che problema c'é? Apri la radio e giri le cloche... Claudio
__________________ "Il tempo non conta... conta quello che fai, se lo fai bene!" | |
|
| |
|
02 luglio 21, 20:24
| #78 (permalink) Top |
| User Data registr.: 22-05-2006 Residenza: Piacenza
Messaggi: 1.547
|
Dopo ben 11 mesi aggiorno la discussione. E’ passato tutto questo tempo perché ho ridotto i lavori sui modelli per dedicarmi un po’ di più alla musica che, a meno di non spendere in strumenti nuovi, costa molto meno. Per un vero miracolo l’XC-142, nel crash del 2020, aveva riportato pochi danni e quindi è stato facile ripararlo. Durante il lockdown ho deciso di verniciarlo e di aggiungere qualche adesivo. L’aereo vero ha un sacco di scritte e simboli su ali e fusoliera ma ormai la mia pazienza è finita e il modello rimarrà così come si vede nelle foto: 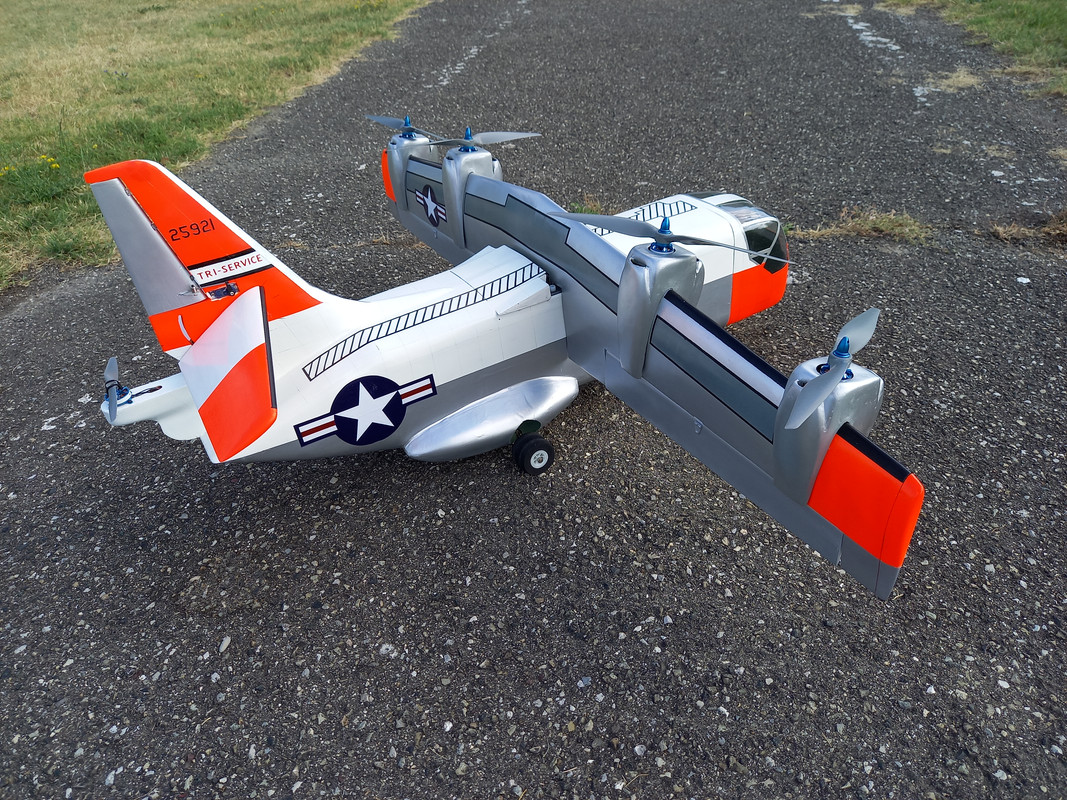  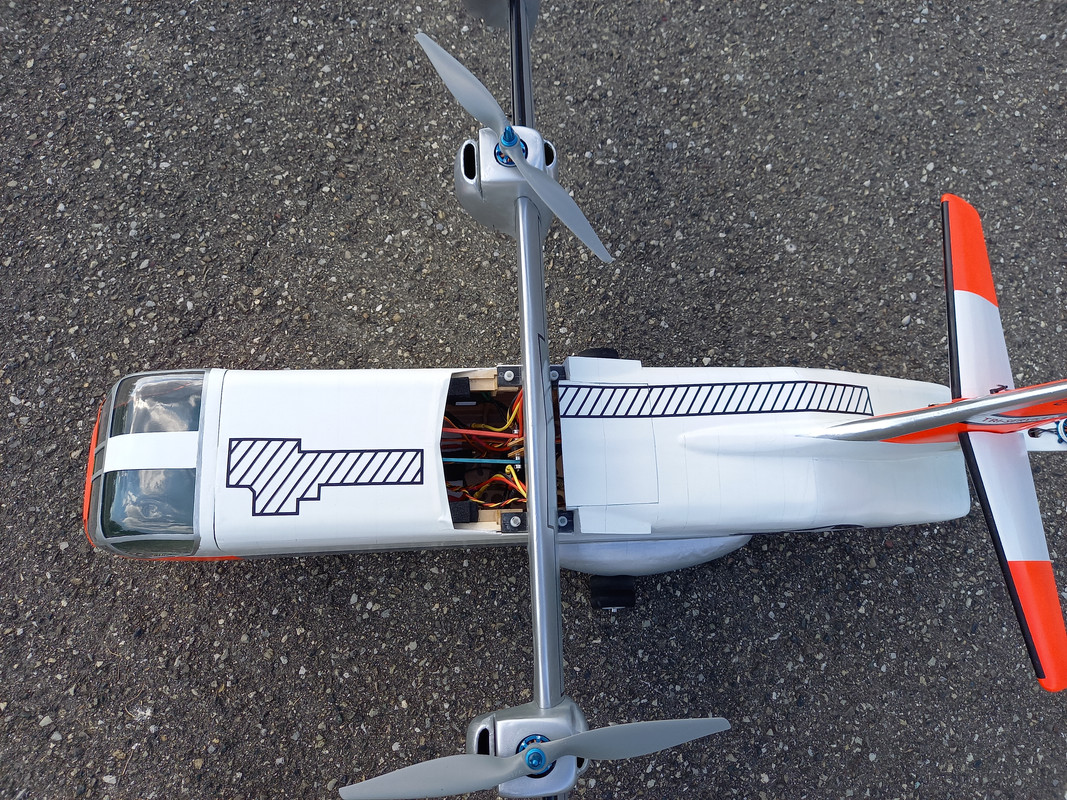   Pochi giorni fa ho fatto alcuni tentativi di hovering a non più di 50 centimetri di altezza. Purtroppo ho riscontrato notevoli oscillazioni in beccheggio (pitch) e rollio (roll) e mi sono fermato subito per evitare danni. Ho scoperto che il motore n.2 è danneggiato e dato che sostituire i cuscinetti è un lavoro problematico, ho ordinato un nuovo motore che fortunatamente costa poco più di 30 euro. Dopo che avrò montato il nuovo motore proverò ancora il modello, con l’obiettivo di ottenere un hovering stabile e controllabile sui tre assi. Al volo orizzontale non ci penso proprio…..  ettore |
|
| |
|
03 luglio 21, 09:46
| #79 (permalink) Top |
| User Data registr.: 14-02-2006 Residenza: provincia VT
Messaggi: 3.672
|
..per le dimensioni che ha...e il peso che ha...forse conviene lasciar stare la sezione di convertimento e fare la vera sensata conversione...ovvero, togliere il motore/l'esc/cavi di coda, i due motori/esc esterni, il comando di basculamento, tutta l'elettronica inutile, lenta (rispetto alla sua instabilita'...) e deleteria (..rispetto al vivere modellisticamente felici..)...dimezzare la batteria, incollare l'ala e divertirsi come motoaliante (..lo diventa, visto che gli si toglie meta' del peso..)  Cosi' 'aggiustato', controvento ti sta in hovering e sembrera' piu' convertiplano di quando lo era per davvero... Ultima modifica di giocavik : 03 luglio 21 alle ore 09:49 |
|
| |
|
03 luglio 21, 09:56
| #80 (permalink) Top |
| User Data registr.: 14-02-2006 Residenza: provincia VT
Messaggi: 3.672
|
...anche il piano di quota andrebbe incollato (..l'ho visto ora.. ..) e metterci due pianetti per il cabra...(..levare tutto lo snodo/cuscinetto inutile/pesante/delicato/pesante in coda...cosi' va via pure il piombo in punta, se c'e'...) ") |
|
| |
 |
| Bookmarks |
| |
 Discussioni simili
Discussioni simili | ||||
| Discussione | Autore discussione | Forum | Commenti | Ultimo Commento |
| Giroscopio su chiglia basculante, consigli | stravanato | Navimodellismo a Vela | 15 | 20 aprile 17 14:45 |
| a proposito di chiglia basculante... | Lele71 | Navimodellismo a Vela | 12 | 20 aprile 10 10:30 |
| stabilizzatore basculante per F3K- help | mau | Aeromodellismo Alianti | 15 | 22 novembre 06 23:10 |
| Piano di coda basculante | bibos | Aeromodellismo | 2 | 25 marzo 05 08:43 |







 Modalità lineare
Modalità lineare

