
- Contenuti
- Community
- Risorse
- Varie

| |
| |
 07 novembre 13, 10:17
07 novembre 13, 10:17
| #1 (permalink) Top |
| Sospeso Data registr.: 20-09-2005
Messaggi: 7.997
|
Grande Luciano  Una info per le mie prossime prove, quindi hai settato il primo WP come TakeOff, messo in Auto e lanciato a mano. Il motore era spento immagino dato che non si dovrebbe accendere se troppo vicini al punto dove è stato armato; quindi si è acceso da solo a quanta distanza dal punto di lancio a mano? |

|  |
|
07 novembre 13, 10:33
| #2 (permalink) Top | |
| User Data registr.: 02-01-2004 Residenza: Vicino a Saronno
Messaggi: 6.998
| Citazione:
In questo modo appena si attiva il modo di volo AUTO il motore parte (neppure a velocità massima) e si puo' lanciare tranquillamente il modello. Il primo WP (WP1 nel mio screenshot del Mission Planner) è un TAKEOFF. Occhio che anche per il takeoff il modello ho rilevato che non si dirige direttamente al WP ma assume una traiettoria volta a girarci intorno per dirigersi al WP2 (vedi figura). Poichè ho ancora dei dubbi sul magnetometro se qualcuno avesse qualche log anche breve di un volo con Arduplane e lo volesse postare mi sarebbe utile per un confronto. In particolare vorrei vedere come sono allineate le linee rosse e nere durante il volo (direzione rilevata da GPS e direzione rilevata da bussola) Luciano | |
|
| |
|
08 novembre 13, 20:01
| #3 (permalink) Top |
| User Data registr.: 04-11-2005 Residenza: Ferrara
Messaggi: 588
| Log - qualche risposta.
Ciao a tutti. Ho spostato i log precedenti dalla cartella Log, e fatto una foto alla stessa a fine voli: https://plus.google.com/u/0/photos/1...54609304939544 Quindi questi file sono stati prodotti mentre ero in volo. Sono visibili gli orari del cambio pila. Provato un play di un log. Aereo fermo per tutta la durata del log. Poi, ho connesso il cavo usb, scaricato tutto e fotografato: https://plus.google.com/u/0/photos/+...54609304939544 in alto la cartella Fixed, creata sulla connessione della prima batteria, che contiene il materiale della foto precedente e poi in radice il contenuto della APM. Provato lo stesso log in play. Perfetto e completo. Quindi, il log è una combo di file prodotti in volo e salvati sul disco del pc, file che rimane a zero k fino a che non si disconnette la telemetria per qualche motivo, e i file scaricati dall'APM. Lo trovo molto interessante. Saluti.
__________________ http://sites.google.com/site/michelemucchi/ |
|
| |
|
08 novembre 13, 20:19
| #4 (permalink) Top |
| User Data registr.: 04-11-2005 Residenza: Ferrara
Messaggi: 588
|
Questo per ora è il massimo della precisione cui sono riuscito ad arrivare durante una missione automatica a 11 punti con ArduPlane. https://plus.google.com/u/0/photos/+...54609304939544 Saluti.
__________________ http://sites.google.com/site/michelemucchi/ |
|
| |
|
09 novembre 13, 13:39
| #5 (permalink) Top | |
| Sospeso Data registr.: 20-09-2005
Messaggi: 7.997
| Citazione:
Luciano come sempre mi sei stato di grande aiuto. Ho scoperto perchè non mi si accendeva il motore a terra e non per colpa di quei due parametri che comunque non conoscevo e ho settato visto che il mio è proprio un tuttala, ma per la mancanza del primo WP come TakeOff. | |
|
| |
|
09 novembre 13, 15:15
| #6 (permalink) Top |
| User Data registr.: 02-01-2004 Residenza: Vicino a Saronno
Messaggi: 6.998
|
Ottimo BIV! Facci sapere come va con il tuttala...sono proprio curioso. Sono invece molto invidioso dei risultati di mikenet76; dalla foto si vede come la traccia del modello segua in modo assai preciso i waypoint senza girarci intorno...veramente un bel risultato. 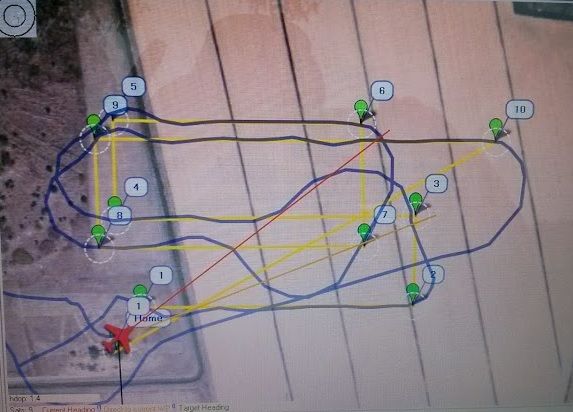 |
|
| |
|
13 novembre 13, 10:23
| #8 (permalink) Top | |
| User Data registr.: 04-11-2005 Residenza: Ferrara
Messaggi: 588
| Citazione:
ll modello arriva ad ali livellate sul waypoint, subito dopo inclina e vira verso il punto successivo cercando di rimettersi in traiettoria. Avrei preferito poter settare un arco di raccordo tra due traiettorie, lasciando il waypoint all'esterno della virata, ma la cosa non è contemplata. Saluti.
__________________ http://sites.google.com/site/michelemucchi/ | |
|
| |
|
13 novembre 13, 19:51
| #9 (permalink) Top |
| User Data registr.: 02-01-2004 Residenza: Vicino a Saronno
Messaggi: 6.998
|
Ho cambiato la posizione della APM mettendola più alta nel cockpit e ho rifatto tutte le calibrazioni degli accelerometri e magnetometro. Ora si comincia a ragionare. Il modello non gira più largo sui WP e atterra perfettamente se la missione prevede un avvicinamento allineato con la pista. 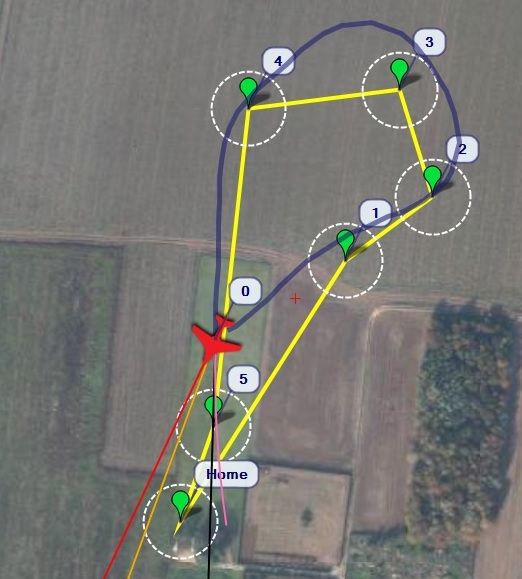 Sono invece diventato matto perchè a volte nel punto più lontano (tra i WP 3 e 4) il modello abbandonava la modalità AUTO e tornava in MANUAL o FBWB e dovevo far ripartire la missione commutando in AUTO da Andropilot. Per questi voletti utilizzo radio in 35Mhz e una vecchia RX Corona...tanto pilota la APM e la radio durante le missioni non viene usata.... GRAVE ERRORE!...è ben vero che la radio non viene usata ma basta un piccolo glitch nel canale 5 che comanda i modi di volo e il modello esce da AUTO (che io imposto con Andropilot). Guardando i log si vede molto bene che il ch5 nel punto più lontano del giro (punto peraltro critico perchè c'è un bel ponte radio nelle vicinanze) ha ogni tanto dei glitch che scendono da 1700 a 1550. Sui servi genererebbero solo una piccola turbolenza sul ch5 fanno invece resettare il modo di volo (se impostato dalla GCS tramite telemetria). Lesson learned: - in zone critiche meglio usare radio in 2.4ghz ") - se vuoi usare radio in 35Mhz imposta il modo di volo da un interruttore sulla radio rc in modo che eventuali glitch sul canale 5 facciano cambiare il modo di volo solo per un istante  Luciano |
|
| |
|
13 novembre 13, 23:25
| #10 (permalink) Top |
| User Data registr.: 11-07-2006 Residenza: Verona
Messaggi: 4.959
|
buono a sapersi anche se io non uso piu le "antenne lunghe". ultimamente sto sperimentando su 5 tutt'ala diversi, cè un sistema per regolare il circle a terra con motore inserito? io sono quello delle prove a terra |
|
| |
 |
| Bookmarks |
| |
 Discussioni simili
Discussioni simili | ||||
| Discussione | Autore discussione | Forum | Commenti | Ultimo Commento |
| Polaris - Build log | albyone | Aeromodellismo Progettazione e Costruzione | 597 | 05 gennaio 20 13:11 |
| Build Log Albyone 3 | Andrea97 | Aeromodellismo Progettazione e Costruzione | 169 | 15 ottobre 14 00:28 |
| P 47 TF build log | MAB.VOLO | Aeromodellismo Riproduzioni e Semiriproduzioni | 60 | 31 marzo 13 23:33 |
| Build-log : Red_Dragon | Alessio68 | Aeromodellismo Ventole Intubate | 52 | 16 settembre 10 15:36 |









 Modalità ibrido
Modalità ibrido
