
- Contenuti
- Community
- Risorse
- Varie

| |
| |
 07 settembre 24, 20:12
07 settembre 24, 20:12
| #1 (permalink) Top |
| User Data registr.: 22-05-2006 Residenza: Piacenza
Messaggi: 1.613
 |
Dopo oltre un anno ho finalmente acquistato un rotore di coda che stò modificando per l'installazione sul convertiplano ad ala basculante XC-142. Si tratta del rotore di coda di un T-REX 450 che ha la dimensione guista per il mio modello. Ho scoperto da poco che esistono servi appositi (molto veloci) per il controllo del rotore di coda degli elicotteri. Me ne serve uno "micro", vale a dire molto piccolo. Potete consigliarmene uno, ovviamente digitale? Grazie. Ettore |

|  |
|
10 settembre 24, 12:34
| #2 (permalink) Top | |
| User Data registr.: 26-09-2009 Residenza: Jesi
Messaggi: 1.247
| Citazione:
__________________  | |
|
| |
|
10 settembre 24, 18:13
| #3 (permalink) Top |
| User Data registr.: 05-05-2020
Messaggi: 527
|
sulla coda dei elicotteri e indispensabile che sia veloce,per quello che devi fare tu penso che bastino dei buoni digitali,con qualche kiletto,sempre per classe 450. tipo i hs 65 o 85. Ultima modifica di nonnotec : 10 settembre 24 alle ore 18:21 |
|
| |
|
10 settembre 24, 21:46
| #5 (permalink) Top |
| User Data registr.: 22-05-2006 Residenza: Piacenza
Messaggi: 1.613
|
Grazie per le risposte. Da quallche giorno, aiutato dall'amico Fausto, sto cercando di realizzare un supporto in modo da assemblare il rotore e il motore coassiale nel modo più preciso possibile. Purtroppo non siamo riusciti a realizzare un pezzo in alluminio dato che la piccola fresa di Fausto ha dei problemi tecnici. Perciò abbiamo deciso di costruire un supporto in vetronite e fissare il rotore e il motore con viti a brugola e dadi autofilettanti da da 2 mm.. 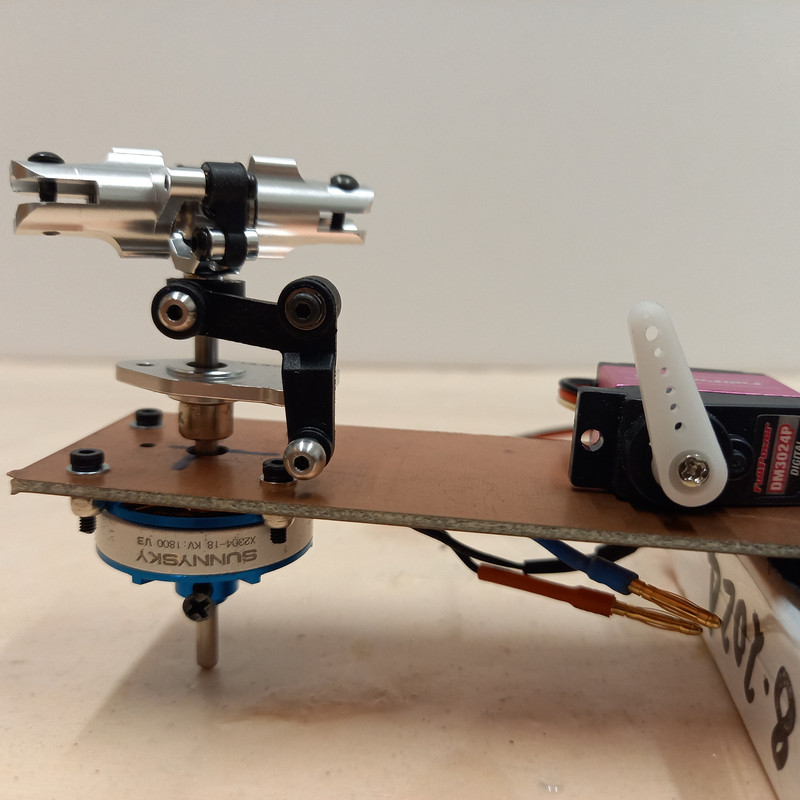 A breve faremo una prova per verificare se il rotore gira senza vibrazioni. In caso positivo acquisterò il servo per il rotore di coda. Grazie ancora. Ettore |
|
| |
|
10 settembre 24, 21:50
| #6 (permalink) Top |
| User Data registr.: 26-09-2009 Residenza: Jesi
Messaggi: 1.247
|
favole; rotore di coda sempre digitali; come controprova siccome mi piace provare di persona, in passato ho provato gli hs65 su trex 450 con giroscopio in coda, durano pochi minuti; gli Hitec si bruciano anche con segnale manuale… quando si parla di segnale che viene da elettronica di stabilizzazione, ci vuole altra roba che supporta almeno 2 o 300Hz, meglio 500Hz; poi c’è il discorso del centro normale o a 760us che ha velocità teoricamente doppia di risposta al segnale in ingresso, che si usano normalmente sulle code, ma il discorso si allunga; se vuoi un controllo della coda serio è un altro discorso, poi non è una cosa proprio standard quella che devi fare, per quello ti ho indicato il top secondo me, dovrebbero essere anche potless, rarissimi, non brushless o coreless
__________________ Ultima modifica di flyhight : 10 settembre 24 alle ore 21:57 |
|
| |
|
10 settembre 24, 22:19
| #7 (permalink) Top |
| User Data registr.: 19-01-2007 Residenza: Dintorni di mestre (DINTORNI)
Messaggi: 2.589
|
Piuttosto che OpenAeroVtol (che è piuttosto antiquato), userei Inav con una buona FC moderna (almeno F4, meglio F7) come, per esempio, una Matek H743 Wlite (https://www.mateksys.com/?portfolio=h743-wlite). 13 uscite PWM, possibilità di usare vari protocolli per la RX (Sbus o CRSF tanto per fare 2 esempi), supporto completo ai moderni procolli degli esc (Oneshot, MultiShot etc etc), Telemetria in tempo reale (voltaggio e corrente integrati nella FC), BEC integrato da 8A per i servi, varie possibilità di connessioni con accessori esterni, MicroSd per il registrare il log di volo etc etc. Certo... al momento è un pò più complesso di OpenAeroVtol da configurare come VTOL, ma sicuramente, una volta fatto, funzionerà decisamente meglio!!! (https://github.com/iNavFlight/inav/b...r/docs/VTOL.md) PS: con questa Matek, volendo, si può anche usare Ardupilot... anch'esso supporta molto bene i Vtol ma è più complesso da configurare in generale e non lo suggerisco se non si ha già avuto un pò di esperienza! PS2: per quanto riguarda la coda, io cercherei di risolvere il problema caricando un pò la coda stessa in modo che lavori sempre in una sola direzione!!! in questo modo si elimina un sacco di problemi!!! Ultima modifica di BBC25185 : 10 settembre 24 alle ore 22:25 |
|
| |
|
10 settembre 24, 23:10
| #8 (permalink) Top | |
| User Data registr.: 22-05-2006 Residenza: Piacenza
Messaggi: 1.613
| Citazione:
Ma non conosco altri sistemi di stabilizzazione che abbiano la miscelazione dei parametri di stabilizzazione come OAVTOL. In pratica è come avere due (o tre...) centraline con parametri completamente diversi e la possibilità di passare durante il volo da una all'altra con un potenziometro o un interruttore a 3 vie sulla trasmittente. Questa cosa è particolarmente utile per il mio convertiplano che di fatto ha 3 fasi di volo: Hovering con ala verticale, volo lento in avanti con ala leggermente inclinata e volo veloce con ala orizzontale. Da notare che con OAVTOL il passaggio da una fase di volo a un'altra è "temporizzabile" nel senso che può durare da zero a varie decine di secondi (credo 40). Penso che non sia possibile ottenere niente di simile con altri software a meno di non installare effettivamente due centraline indipendenti.....ma che comunque non possono essere "miscelate". A riprova del fatto che OAVTOL è tuttora l'unico sistema in grado di gestire al 100% un modello VTOL, l'aeromodellista Joel Vlashov (che ha possibilità economiche notevoli e ottime capacità tecniche...), continua a usare OAVTOL sul suo F35 con una mezza dozzina di ventole e una ventina di servi. L'idea dell'elica a passo variabile è nata proprio dal fatto che il modello "pesante in coda" durante l'hovering e un elica solo traente verso l'alto, non è mai stato stabile sull'asse di beccheggio  (v. video all'inizio della discussione). (v. video all'inizio della discussione).Comunque grazie. ettore | |
|
| |
 |
| Bookmarks |
| |
 Discussioni simili
Discussioni simili | ||||
| Discussione | Autore discussione | Forum | Commenti | Ultimo Commento |
| Cerco rotore principale e di coda tripala | luca hirobo | Compro | 1 | 24 marzo 17 22:56 |
| cerco rotore di coda quadripala per 450 | brich83 | Elimodellismo Riproduzioni | 2 | 12 aprile 16 00:58 |
| Cerco rotore di coda Vario in alluminio | master84 | Compro | 0 | 27 luglio 13 09:52 |
| cerco tubo di coda cardano e rotore trex 700 | streminato | Compro | 0 | 29 ottobre 12 09:22 |
| Help! cerco eli con rotore di coda! | lucky_04 | Elimodellismo Principianti | 2 | 15 settembre 07 20:59 |








 Modalità ibrido
Modalità ibrido
