allora
gli ingressi a +5V vanno collegati tutti insieme all'alimentatore +5V
gli ENBL idem come sopra
poi
diamo un nome ai vari motori chiamandoli "asse X"; "asse Y"; "asse Z"; "asse A"
prendiamo la scheda dell'asse X
il Filo PUL va collegato al P2 della breachup Board
il Filo DIR va collegato al P3 della breachup Board
prendiamo la scheda dell'asse Y
il Filo PUL va collegato al P4 della breachup Board
il Filo DIR va collegato al P5 della breachup Board
prendiamo la scheda dell'asse Z
il Filo PUL va collegato al P6 della breachup Board
il Filo DIR va collegato al P7 della breachup Board
prendiamo la scheda dell'asse A
il Filo PUL va collegato al P8 della breachup Board
il Filo DIR va collegato al P9 della breachup Board
collega la breackup board tramite l'appoosito cavo alla porta parallela del pc (dovresti avere solo una vaschetta che si adatta al cavo quindi non puoi sbagliare... )
dopodiche con il programmino che ti ho detto prima "PARMON"
lo avvi, si apre una finestrella come quella sotto
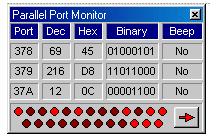
tu devi cliccare sui pallini rossi (nel tuo programmino sono verdi) , partendo dal 2do a destra in alto e teoricamente il motore X dovrebbe fare uno scattino.. e clicchi ripetutamente dovrebbe girare in un senso (usa un pezzo di nastro attaccato a mo di bandiera sull'albero del motore per agevolare la vista) se clicchi una volta il pin 3 e poi di nuovo sul pin 2 il motore gira nell'altro senso..
stessa cosa per i motori Y,Z e A ma con i pin a seguire ovvero 4,5 per Y 6,7 per Z, 8,9 per A.
come funziona questo sistema...
in pratica i pin 2,4,6 della porta parallela dicono alle relative schede (X,Y,Z,A) quanti passi deve fare il motore, mentre i pin 3,5,7 ne gestiscono la direzione, ovvero l'avanti e indietro dei relativi motori (X,Y,Z,A).
volendo si potrebbe anche mettere l'enable sotto ad un pin della parallela in modo che quando la scheda non riceve comandi di movimento essi siano "spenti", ma io non l'ho mai messo

ps se devi utilizzare la scheda per la TGA (taglio ali), allora devi chiedere o cercare come configurare correttamente mach3 , io non l'ho mai configurato per questo tipo di utilizzo.