Citazione:
Originalmente inviato da Capitan Harlock  Per saper per bene come intervenire:
chiedo spiegazioni su questa pagina di HeliCommand !! 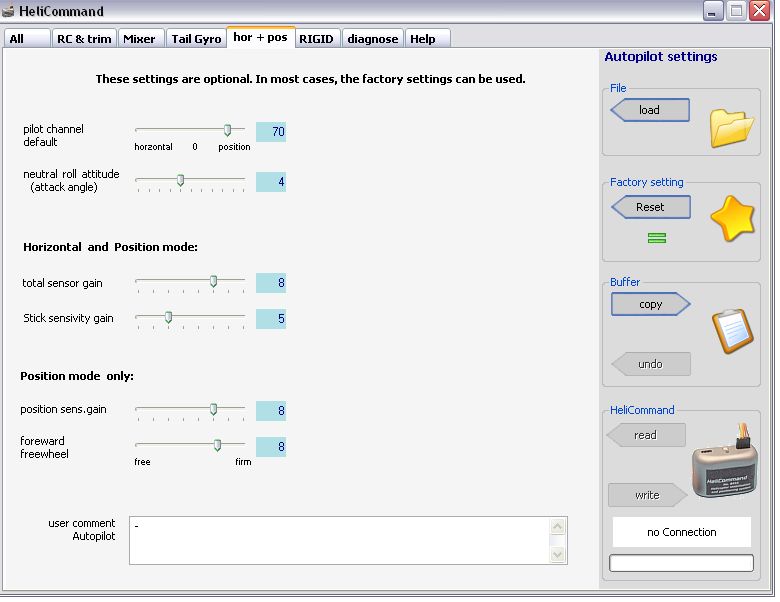
Grazie!! |
Il primo e' il gain dell' HC, non lo usi se hai collegato il canale pilot. Dal canale pilot cambi il valore passando per le tre funzioni Giallo Verde Rosso.
Se non usi il canale ausiliaro imposti da qui il modo di funzionamento.
Il secondo non me lo ricordo.
Total sensor gain definisce il guadagno totale del sistema. Via radio selezioni da 0 a 100%, ma da qui gi dici 100% di cosa.
Questo valore lo puoi cambiare a secondo se l'HC e' montato su un eli piccolo o grande. Ma devi fare delle prove.
Stick sensitive e' quanto vuoi che lo stick comandi il modello, per capirci, appena dai stick l'HC stacca e tu comandi. Variando questo valore hai un minimo di ritardo (ti tremano i pollici?).
Position sensitive gain e' il gain del sensore ottico. Anche qui da fare delle prove su vari fondi (terra erba, cemento...).
Forward freewheel e' forse il piu' usato.
Avrai notato che appena dai un po di ciclico per fare volato, il modello avanza fino a che hai stick dentro, appena lasci impenna per frenare e si ferma (HC comanda). Se regoli free wheel ti permette di fare volato normalmente come con un qualsiasi altro elicottero. Anche qui vai per passi con i test.
Ciao