Dopo aver fatto un po' di esperienza con questo sistema per il volo assistito ritengo che sia cosa utile farne una segnalazione anche nella sezione FPV in quanto ritengo possa essere un valido supporto per chi pratica questa disciplina. In effetti tale soluzione era stata accennata in alcuni altri thread in questa sezione ma non mi sembra sia stata poi qui oggetto di test più approfonditi.
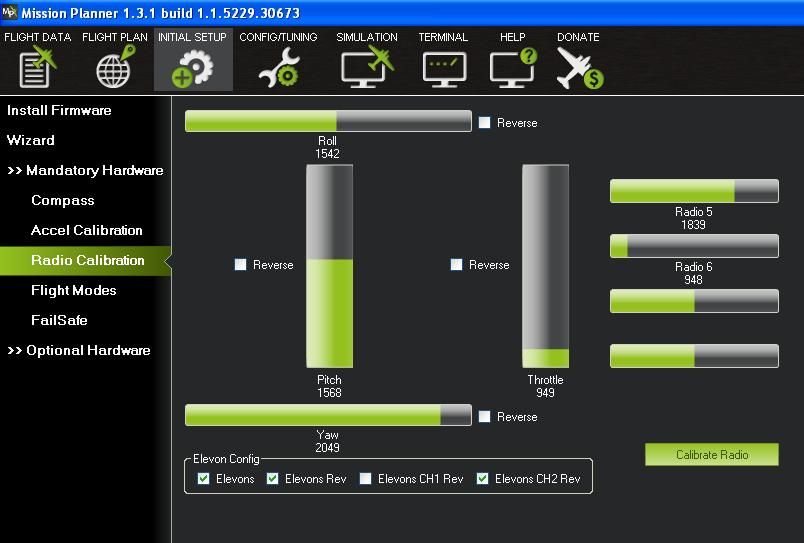
In sostanza grazie a questa scheda dotata di sw open (APMplane) e di sensori vari (bussola, altimetro barometrico, giroscopi, accelerometri e GPS) è possibile, tramite radiomodem in 433mzh, avere a terra su una apposita Ground Control Station (Mission Planner o altre) tutti i dati di volo, la mappa con la posizione GPS del modello, il video con l'orizzonte artificiale generato dalla scheda e i dati di volo in sovrapposizione.
La scheda garantisce molte modalità di volo assistite al fine di autolivellare il modello, mantenere la quota, effettuare il ritorno a casa automatico, mettersi in volo automatico in una sorta di circuito di attesa (loiter), mantenimento della rotta (cruise control), ecc.
E' anche possibile caricare sulla scheda un percorso costituito da waypoint tramite il quale si puo' realizzare un decollo automatico e perfino un ottimo atterraggio automatico.
E' possibile inviare comandi al modello tramite la Ground Control Station ma naturalmente la radio RC è sempre e costantemente attiva in modo da riprendere il controllo RC del mezzo in qualsiasi momento. Il controllo RC ha sempre la priorità.
Per ulteriore sicurezza è anche possibile definire una sorta di recinto (fence) oltre al quale il modello non puo' andare (per esempio 70 metri di altezza e 200 metri di distanza). Se il modello tenta di andare (in volo automatico o manuale) oltre il recinto la scheda riporta il modello dentro il recinto medesimo.
Se questa cosa vi sembra utile sto registrando in un questo thread una sorta di build log delle esperienze che sto conducendo con questa scheda e che, dopo aver integrato anche il video sulla Ground Control Station, penso possano essere utili anche a chi fa FPV.
Luciano
In sostanza grazie a questa scheda dotata di sw open (APMplane) e di sensori vari (bussola, altimetro barometrico, giroscopi, accelerometri e GPS) è possibile, tramite radiomodem in 433mzh, avere a terra su una apposita Ground Control Station (Mission Planner o altre) tutti i dati di volo, la mappa con la posizione GPS del modello, il video con l'orizzonte artificiale generato dalla scheda e i dati di volo in sovrapposizione.
La scheda garantisce molte modalità di volo assistite al fine di autolivellare il modello, mantenere la quota, effettuare il ritorno a casa automatico, mettersi in volo automatico in una sorta di circuito di attesa (loiter), mantenimento della rotta (cruise control), ecc.
E' anche possibile caricare sulla scheda un percorso costituito da waypoint tramite il quale si puo' realizzare un decollo automatico e perfino un ottimo atterraggio automatico.
E' possibile inviare comandi al modello tramite la Ground Control Station ma naturalmente la radio RC è sempre e costantemente attiva in modo da riprendere il controllo RC del mezzo in qualsiasi momento. Il controllo RC ha sempre la priorità.
Per ulteriore sicurezza è anche possibile definire una sorta di recinto (fence) oltre al quale il modello non puo' andare (per esempio 70 metri di altezza e 200 metri di distanza). Se il modello tenta di andare (in volo automatico o manuale) oltre il recinto la scheda riporta il modello dentro il recinto medesimo.
Se questa cosa vi sembra utile sto registrando in un questo thread una sorta di build log delle esperienze che sto conducendo con questa scheda e che, dopo aver integrato anche il video sulla Ground Control Station, penso possano essere utili anche a chi fa FPV.
Luciano
")
 e per festeggiare ho deciso di regalarmi un altro EasyStar (questo sarà il 7° della serie) e farlo svolazzare nelle campagne dalle mie parti!!!
e per festeggiare ho deciso di regalarmi un altro EasyStar (questo sarà il 7° della serie) e farlo svolazzare nelle campagne dalle mie parti!!! , voi continuate a scrivere, io continuerò a leggere....
, voi continuate a scrivere, io continuerò a leggere.... 
")






Commenta