Ho pensato di provare ad aprire una discussione riguardante il firmware per ESC BLHeli.
Esiste già una discussione dedicata all'argomento nella sezione Elimodellismo Elettronica, ma un po' perché è già molto lunga, un po' perché incentrata soprattutto sulla versione per elicotteri, ed anche perché molto di recente è stato nuovamente ripreso il supporto agli ESC Atmel based (praticamente la quasi totalità degli esc usati nei multirotori), credo sia interessante sviluppare l'argomento all'interno della sezione dedicata ai multirotori.
In breve, BLHeli è un progetto creato e sviluppato da Steffen Skaug (skaug nei forum) con finalità di estendere il governor e gestire una coda brushless nei microelicotteri.
La parte GUI è stata creata e viene curata da Achim (4712 nei forum).
Inizialmente sviluppata per piattaforma Atmel, in seguito questa era stata abbandonata in favore degli ESC basati su MCU SiLabs.
Si divide in tre tipologie di fw, Main, Tail e Multi (creata poco più di un anno fa).
Le prime due sono specifiche per elicotteri, sebbene la Tail si presta meglio della Multi alla conversione brushless di micro mr che nascono brushed.
C'è più di un motivo che rende questo progetto interessante per i multirotori, anche confrontato al fw sviluppato da Simon Kirby:
I contro rispetto a SimonK è che la GUI è windows only, e che lo start-up dei motori è ancora un pelo più incerto rispetto a SimonK.
Ma il software viene spesso modificato in modo radicale da Steffen tra una versione e l'altra, con tanto di changelog ben chiaro e definito.
Ad esempio, siccome ha dichiarato che nella prossima release il tempo di off durante l'inversione della rotazione sarà estremamente ridotto e l'inversione molto affidabile, già credo penso che la routine di start up sarà stata rivista completamente.
Il forum di riferimento sul nuovo corso di BLHeli è su RCgroups, dove alla prima pagina si trova il link ai sorgenti ed all'ultima versione della GUI BLHeliSuite.
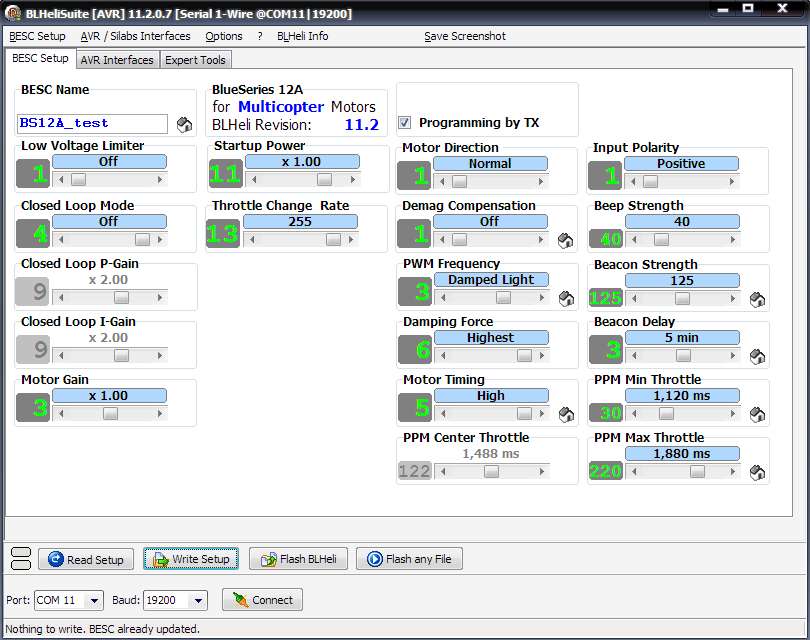
Questo è lo screenshot della GUI con le impostazioni che a breve andrò a testare sui BS12A con motori Tiger MN2204-2300kv, con regenerative braking attivato.
Chiudo qui il primo post per non appesantirlo troppo, con una richiesta:
poiché questo genere di argomenti diventa ineluttabilmente molto dispersivo, vi chiedo di inserire un titolo descrittivo e chiaro dell'argomento trattato, anche nei quote, in modo da facilitare la ricerca degli argomenti, sempre nel caso che l'argomento sia di interesse e che verrà sviluppato approfonditamente.
P.S.
Steffen è una persona estremamente altruista e disponibile ed ha sempre dichiarato di non volere soldi per il suo lavoro.
Nonostante ciò, qualcuno ha creato una sorta di donate page dove è riportato il suo paypal address per fare donazioni, ma meglio della donazione (e soprattutto più utile), è inviargli un nuovo esc non compreso nel suo github da testare e mappare.
A parte una doverosa donazione in quanto utilizzatore del suo codice dal day one, io gli ho inviato tre esc che poi sono stati mappati e sono attualmente tra la lista dei flashabili.
Esiste già una discussione dedicata all'argomento nella sezione Elimodellismo Elettronica, ma un po' perché è già molto lunga, un po' perché incentrata soprattutto sulla versione per elicotteri, ed anche perché molto di recente è stato nuovamente ripreso il supporto agli ESC Atmel based (praticamente la quasi totalità degli esc usati nei multirotori), credo sia interessante sviluppare l'argomento all'interno della sezione dedicata ai multirotori.
In breve, BLHeli è un progetto creato e sviluppato da Steffen Skaug (skaug nei forum) con finalità di estendere il governor e gestire una coda brushless nei microelicotteri.
La parte GUI è stata creata e viene curata da Achim (4712 nei forum).
Inizialmente sviluppata per piattaforma Atmel, in seguito questa era stata abbandonata in favore degli ESC basati su MCU SiLabs.
Si divide in tre tipologie di fw, Main, Tail e Multi (creata poco più di un anno fa).
Le prime due sono specifiche per elicotteri, sebbene la Tail si presta meglio della Multi alla conversione brushless di micro mr che nascono brushed.
C'è più di un motivo che rende questo progetto interessante per i multirotori, anche confrontato al fw sviluppato da Simon Kirby:
- - è possibile utilizzarlo su un gran numero di ESC, sia Atmel che SiLabs
- - è possibile programmare i parametri da TX
- - è possibile programmare i parametri da GUI
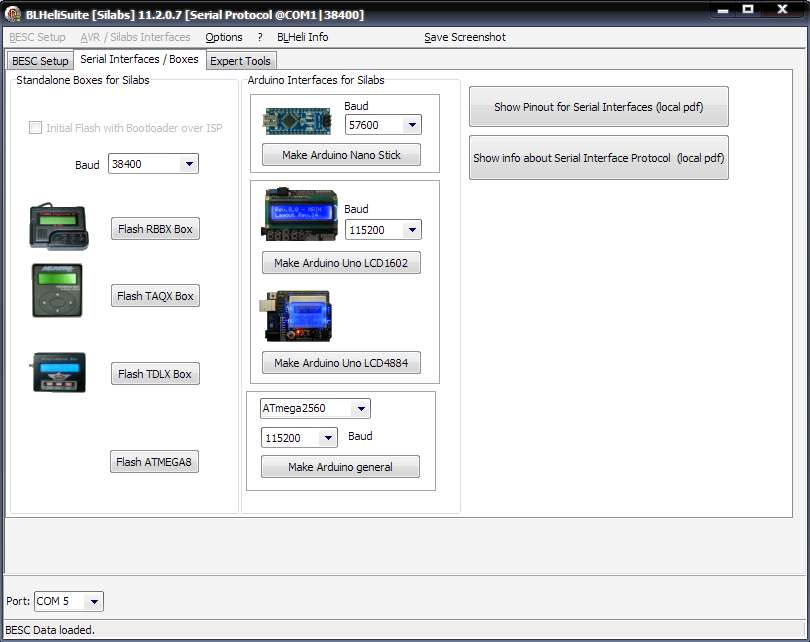
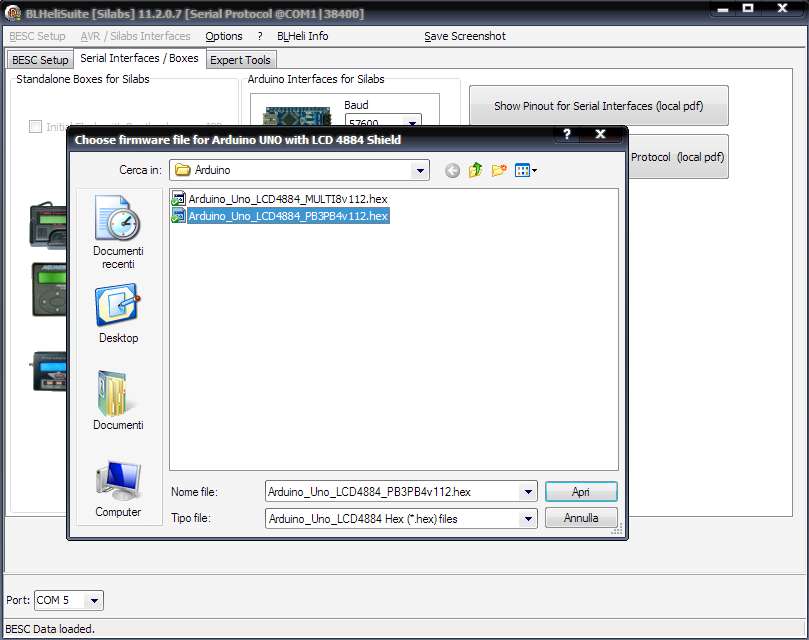
- sarà a breve possibile programmare i parametri con una AVR box senza bisogno di PC
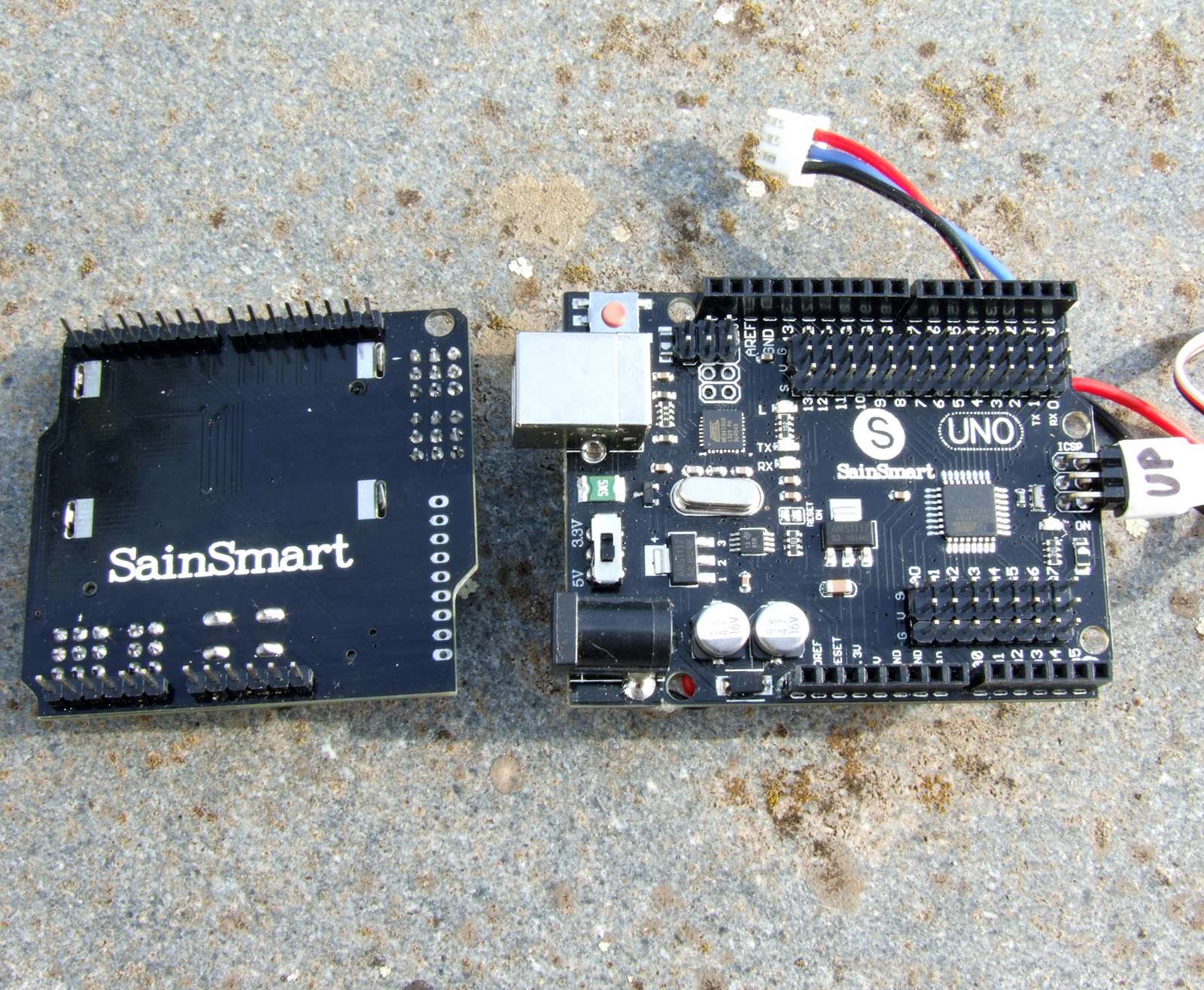
- - sebbene possa sembrare una scocciatura rispetto al kazzillo per flashare SimonK, sugli esc SiLabs, la necessità di saldare 3 fili sull'esc per il flashing ed il setup dei parametri, rende l'esc velocemente configurabile lasciando in sito un micro connettore per questo scopo
- - il regenerative braking disponibile anche su SimonK (comp_pwm) previa compilazione e flashing, è altamente configurabile per renderlo adatto alla specifica combinazione ESC/motore
- - è disponibile il closed loop, una sorta di governor rovesciato studiato appositamente per i multirotori ad alte prestazioni
- - è disponibile la funzione di inversione veloce della rotazione per multirotori 3D a passo fisso, non usabile al momento, ma pare che sarà enormemente migliorato nella prossima imminente release.
- - nel fw è inserita la funzione beacon (configurabile) che genera toni ben udibili dopo un tempo di inattività prestabilito, per aiutare a ritrovare un modello disperso
I contro rispetto a SimonK è che la GUI è windows only, e che lo start-up dei motori è ancora un pelo più incerto rispetto a SimonK.
Ma il software viene spesso modificato in modo radicale da Steffen tra una versione e l'altra, con tanto di changelog ben chiaro e definito.
Ad esempio, siccome ha dichiarato che nella prossima release il tempo di off durante l'inversione della rotazione sarà estremamente ridotto e l'inversione molto affidabile, già credo penso che la routine di start up sarà stata rivista completamente.
Il forum di riferimento sul nuovo corso di BLHeli è su RCgroups, dove alla prima pagina si trova il link ai sorgenti ed all'ultima versione della GUI BLHeliSuite.
Questo è lo screenshot della GUI con le impostazioni che a breve andrò a testare sui BS12A con motori Tiger MN2204-2300kv, con regenerative braking attivato.
Chiudo qui il primo post per non appesantirlo troppo, con una richiesta:
poiché questo genere di argomenti diventa ineluttabilmente molto dispersivo, vi chiedo di inserire un titolo descrittivo e chiaro dell'argomento trattato, anche nei quote, in modo da facilitare la ricerca degli argomenti, sempre nel caso che l'argomento sia di interesse e che verrà sviluppato approfonditamente.
P.S.
Steffen è una persona estremamente altruista e disponibile ed ha sempre dichiarato di non volere soldi per il suo lavoro.
Nonostante ciò, qualcuno ha creato una sorta di donate page dove è riportato il suo paypal address per fare donazioni, ma meglio della donazione (e soprattutto più utile), è inviargli un nuovo esc non compreso nel suo github da testare e mappare.
A parte una doverosa donazione in quanto utilizzatore del suo codice dal day one, io gli ho inviato tre esc che poi sono stati mappati e sono attualmente tra la lista dei flashabili.


")



Commenta