
- Contenuti
- Community
- Risorse
- Varie

| |
 28 aprile 14, 00:28
28 aprile 14, 00:28
| #431 (permalink) Top |
| User Data registr.: 16-06-2012 Residenza: Roma
Messaggi: 736
| Mini guida alla regolazione del piatto e del passo- Parte 1
Come promesso ecco una piccola guida su come regolare partedo da zero la testa di un X3V. Questo metodo è valido anche se si utilizzano servi diversi da quelli Skyartec. Questo è il metodo che utilizzo io e con cui ho avuto successo, niente di più. Per questa guida utilizzo uno strumento digitale per misurare il passo, non è indispensabile, ma è davvero comodo. Anche il calibro può essere sostituito con uno strumento equivalente. Passo 1) Regolare il collarino a 43mm, la misura è dal'inizio dell'albero all'estremità in basso del collarino  In questo modo l'albero dovrebbe sporgere leggermente dal supporto del cuscinetto inferiore 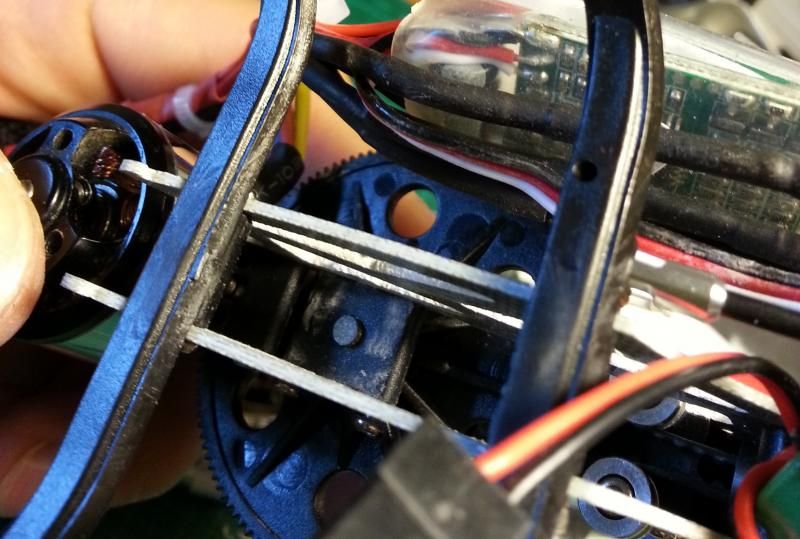 Passo 2) Mettere i servo in posizione neutrale (basta collegare la batteria per un secondo). Installare i braccetti dei servo, cercando di tenerli più in parallelo possibile. Nel caso si dovesse scegliere tra leggermente in alto o leggermente in basso, sempre meglio la seconda opzione.  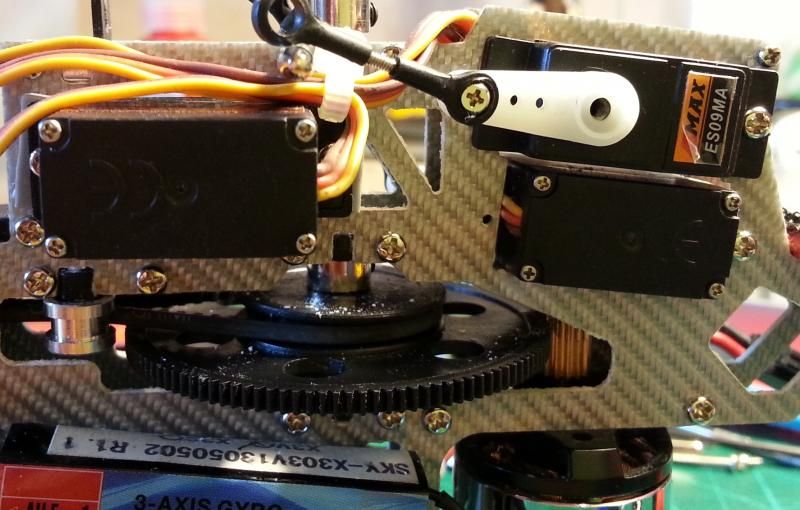 Passo 3) Avvitare tutti i link fino in fondo, in modo che siano più corti possible. Dopo averli accorciati, collegarli al piatto. Livellare il piatto, cercando di allungare i link il meno possibile. Questa regolazione dovrà coinvolgere solo due link, quello che è inizialmente più in alto sarà il nostro punto di riferimento. Io per questa regolazione uso una semplice fascetta tagliata a misura. 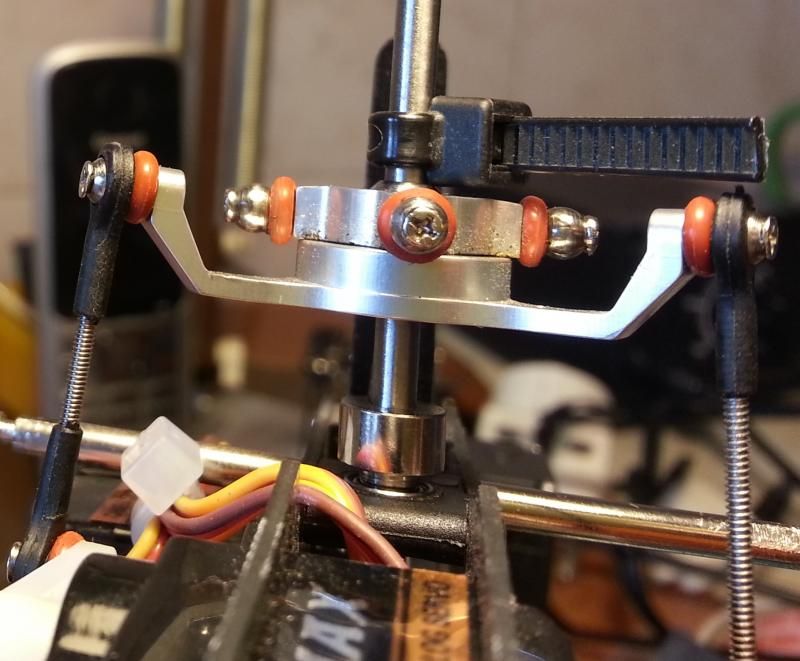 Una volta livellato il piatto, rimontare la testa. Al termine di questa fase, con i servo in posizione neutrale, i braccetti del piatto dovrebbero essere perpendicolari all'albero. 
__________________ TH-9X Open9X - Protos 500 Robrird G31 - Skyartec X3V - mCPX V2 (M5/10A-HK) - Skyartec WNCPX BL - WL Toys V911/Y911/V929 (a prendere polvere sullo scaffale) - Super Mono X |

|  |
|
28 aprile 14, 00:38
| #432 (permalink) Top |
| User Data registr.: 16-06-2012 Residenza: Roma
Messaggi: 736
| Mini guida alla regolazione del piatto e del passo- Parte 2 Passo 4) FARE MOLTA ATTENZIONE Accendere la radio, collegare la batteria. Tenere la radio in un posto sicuro, in modo che non si attivi il motore per sbaglio. Per sicurezza una volta inizializzata la centralina si può scollegare il motore. Mettere in piano il modello, con le pale montate. Si può utilizzare qualche spessore sotto il carrello per questo scopo.  Mettere la radio in idle, con lo stick al centro e il punto 3 del pitch a 50/55 e fare in modo che il pitch sia zero. (50/55 significa che se ci sono pochi gradi o decimi di grado di devergenza dallo zero, basta agire sulla radio senza variare la lunghezza del link sulle manine)  Per regolare il pitch agire sul link che va dalle manine al piatto.  Passo 5) Regolare rispettivamente il punto 1 e 5 sulla radio, in modo da avere -12° e +12° con lo stick agli estremi   Per i punti 2 e 4 fare la media, ad esempio nel mio caso. 1 = 38 e 3 = 50, 12 punti di differenza, quindi 2 sarà 44. In questo modo si ha una risposta lineare tra stick e gradi di passo. Stesso discorso per il punto 4 3=50 5=61 quindi 4 sarà 56. Passo 6) Ruotare il rotore di 180° e verificare che i gradi sull'altra pala coincidano con quelli del punto precedente. Nel mio caso le pale non hanno un buon tracking, infatti la seconda pala con lo stick al centro è inclinata di 3°  Fare le correzioni necessarie, e controllare che i gradi di passo coincidano su entrambe le pale. Un ulteriore controllo del tracking verrà fatto dinamicamente in volo, facendo volare il modello di fronte a noi, si deve vedere il profilo di una sola pala. Passo 7) Una volta regolato il modello in idle si può impostare il normal. Il procedimento è identico, cambiano solo i valori del passo. Io in normal volo con una curva motore 0 35 55 75 100 e di passo -4/+12 con lo zero a centro stick. In normal comunque io faccio solo decollo e atterraggio, per il resto preferisco volare in idle up 
__________________ TH-9X Open9X - Protos 500 Robrird G31 - Skyartec X3V - mCPX V2 (M5/10A-HK) - Skyartec WNCPX BL - WL Toys V911/Y911/V929 (a prendere polvere sullo scaffale) - Super Mono X |
|
| |
|
28 aprile 14, 00:39
| #433 (permalink) Top |
| User Data registr.: 16-06-2012 Residenza: Roma
Messaggi: 736
|
Ho cercato di essere il più conciso possibile ma al tempo stesso di essere chiaro. Se ci sono dubbi non esitate a chiedere, buoni voli.
__________________ TH-9X Open9X - Protos 500 Robrird G31 - Skyartec X3V - mCPX V2 (M5/10A-HK) - Skyartec WNCPX BL - WL Toys V911/Y911/V929 (a prendere polvere sullo scaffale) - Super Mono X |
|
| |
|
28 aprile 14, 13:30
| #434 (permalink) Top | |
| User Data registr.: 22-11-2013
Messaggi: 1.290
|
Originalmente inviato da eaman Secondo voi si potrebbe usare una RX come queste per l'X3V? Citazione:
Un po' una palla: si potrebbe utilizzare un ZYX Tarot ma cosi' ci vanno altri 40/50e, avrei anche degli adattatori per i connettori da 1.25mm dei servo... Sarebbe molto buono se si potesse usare questa RX+gyro: OrangeRX RX3SM Micro 3-Axis Flight Stabilizer w/DSM2 Compatible 4CH 2.4Ghz Receiver w/Remote ON/OFF , so che e' possibile flashare il firmware con la piu' flessibile versione open source ma il "programmatore" (il connettore da mettere sul chip) costa un imbarazzante cinquantina di euro dato che non ha una porta dedicata. Ho in arrivo una di queste: OrangeRX RX3S 3-Axis Flight Stabilizer V2 (V2.1 firmware) (V-tail/Delta/AUX) , quando mi arriva provo a vedere se si trova un modo di flasharla con qualcosa di economico, sarebbe una soluzione economicamente interessante ")
__________________ v911 - LadyBird - nQX - SuperCP - HFP80 - HCP80 - HCP100 - Devo 7e MoD - Taranis - Heli-X Wing Wing Z-84 - Bonsai - M. Sonic - Sonic 64 EDF - S.Kinetic - Rare Bear M. - Walrus - Phoenix 2K - M. DLG - Sbach EPP - Extra 330 - Edge 540T - MX2 EPP 955 - Yak - Reaktor - SCT 1/16 | |
|
| |
|
28 aprile 14, 20:25
| #435 (permalink) Top | |
| User Data registr.: 28-06-2009 Residenza: napoli
Messaggi: 10.416
| Citazione:
Molto chiaro !
__________________ http://www.youtube.com/user/edubufly | |
|
| |
|
30 aprile 14, 11:14
| #436 (permalink) Top | ||
| User Data registr.: 30-08-2012 Residenza: Bracciano (RM)
Messaggi: 696
| Citazione:
Preciserei meglio solamente una cosa che hai esposto qui per far comprendere meglio ai niubbi: Citazione:
Per il resto nulla da eccepire. Voglio però discutere di una differenza tecnica fra come spieghi tu e come faccio io. Tu, per mettere lo 0° a centro stick, prima livelli il piatto poi regoli i link fra piatto e manine; io livello il piatto e lavoro direttamente sui link dei servi e uso i link che usi tu solo per regolare solamente un evenduale differenza fra le due pale. Ora posto che il tuo metodo è sicuramente più efficiente in quanto, con il mio metodo per questo eli, rimane più complicato in quanto si deve svitare il ball link dell'elevatore per regolarlo: sicuramente utilizzerò il tuo la prossima volta (thnks  ) )Mi chiedevo, però, la differenza fra i due dove impatta in volo: secondo te? Inoltre guardando la foto "da sotto" si vede che l'albero (e del resto lo scrivi) fuoriesce di circa 1 mm; nel mio stock era perfettamente allineato. Questa cosa, che di per sé non credo abbia alcun riflesso, me ne ha fatta venire in mente un'altra a seguito di un rimontaggio errato dell'albero. Infatti una volta ho rimontato l'albero al contrario visto che i fori ci sono da entrambi i lati (a proposito ma il foro sotto a che serve?). Ovviamente i buchi fra l'hub e l'albero non coincidono: bisognerebbe accorciare la parte superiore di (a occhio e memoria) circa 3-4 mm. Questo abbasserebbe il fulcro di rotazione (baricentro?). Mi chiedevo perciò: cosa succederebbe in volo? Ragionando come se si utilizzasse un pendolo: accorciando la leva il pendolo va più veloce; quindi: anche l'eli è più reattivo? Cosa ne pensi?
__________________ mcpx v2 full brushless; 130x/180cfx/230s ; OXY4 e OXY3 con Brain2; DX9-Devo10-Radiomaster TX16s[/B] Heli-X & Phoenix 5 simulators | ||
|
| |
|
30 aprile 14, 12:35
| #437 (permalink) Top |
| User Data registr.: 28-10-2012 Residenza: casa
Messaggi: 2.160
|
per servo in posizione neutrale intende al centro o centrato come si suol dire riferendosi appunto al piano di appoggio del modello cioè esattamente il piu possibile paralleli al tavolo  ,volendo ci si può riferire anche alla erticale e quindi dovranno essere a 90° rispetto ad essa , poi è sempre meglio avere i link dei servi regolati bene e agire come hai notato sui i link di testa che son solo 2 e di facile settaggio dato che ne puoi misurare l'ncidenza sule pale frequentemente , se non sbaglio ci sono modelli che hanno un sistema sui link alti per regolare senza nemmeno smontare il link dall uniball credo che i goblin lo usino ,volendo ci si può riferire anche alla erticale e quindi dovranno essere a 90° rispetto ad essa , poi è sempre meglio avere i link dei servi regolati bene e agire come hai notato sui i link di testa che son solo 2 e di facile settaggio dato che ne puoi misurare l'ncidenza sule pale frequentemente , se non sbaglio ci sono modelli che hanno un sistema sui link alti per regolare senza nemmeno smontare il link dall uniball credo che i goblin lo usino
__________________ wltoys 977 x2.. marchiato x1 valli a capire ... e ufo wltoys .. mi manchi!
|
|
| |
|
30 aprile 14, 15:11
| #438 (permalink) Top | |
| User Data registr.: 30-08-2012 Residenza: Bracciano (RM)
Messaggi: 696
| Citazione:
per la prima lo so...era solo per specificare meglio a chi non ne sa nulla Per la seconda leggendo il post mi sono reso conto che è più facile rispetto a come faccio io che è solo un annetto che mi dedico a ste zanzare e finora con il 130X e MCPX ho fatto sempre così perché avevano i link alti fissi (ora li ho cambiati con DFC regolabili)...ma volevo sapere se ci sono differenze di "resa" nell'elicottero...anche secondo te per chi legge ovviamente
__________________ mcpx v2 full brushless; 130x/180cfx/230s ; OXY4 e OXY3 con Brain2; DX9-Devo10-Radiomaster TX16s[/B] Heli-X & Phoenix 5 simulators | |
|
| |
|
30 aprile 14, 15:20
| #439 (permalink) Top | ||
| User Data registr.: 16-06-2012 Residenza: Roma
Messaggi: 736
| Citazione:
Per chiarire al meglio credo sia importante capire quale risultato vogliamo ottenere. Noi vogliamo avere il piatto, in assenza di comandi alettone/elevatore perfettamente parallelo al disco del rotore, per far cio' utilizziamo l'asse principale, come riferimento essendo perpendicolare ad entrambi i piani. Se il piatto sia o meno parallelo al piano di appoggio, in realta' non e' importante, potremmo avere un elicottero che tende a picchiare e in quel caso non sarebbero paralleli. Io come riferimento ho preso il piano orizzontale del telaio, che sappiano essere perpendicolare all'albero. Quello che ci interessa infatti e' che il piatto sia perfettamente perpendicolare all'albero. Per quanto riguarda i braccetti dei servo, ci interessa che siano paralleli al piatto, in modo da far lavorare i link in modo speculare rispetto al centro. L'idea alla base di tutto il discorso e' di avere piu' possibile gli angoli tra i leverismi perpendicolari in posizione neutrale (al centro), in modo che la corsa sia omogenea in un senso e nell'altro, cioe' tra i -12° e 0° del passo negativo e i 0° e +12° di quello positivo. Se fai caso, una volta montata la testa anche i braccetti del piatto sono perfettamente a 90°. Citazione:
Si creerebbe in oltre un problema, infatti avendo i link hanno una lunghezza minima, significa che per abbassare il piatto dovresti far lavorare i braccetti dei servo in modo non perpendicolare al link stesso (rivolti verso il basso in posizione neutra) e andresti a diminuire la possibile escursione del piatto in negativo essendo questa limitata dalla distanza tra collarino e cuscinetto. Con il mio metodo si ha la lunghezza dei link minima, infatti uno si tiene completamente avvitato ed allo stesso tempo si ha la massima escursione nella corsa dei servo. Infatti avendo tutto bene perpendicolare, non si hanno problemi di finecorsa in nessun elemento coinvolto. Quindi avendo il canale sulla radio al 50%, il braccetto parallelo al piatto e il link quasi perpendicolare, i braccetti anch'essi perpendicolari, ti trovi nella situazione ottimale. Se metti l'albero al contrario, l'estremita' ti va a sbattere contro lo spindle e non riesci a mettere la vite. Non so a cosa serva l'altro buco.
__________________ TH-9X Open9X - Protos 500 Robrird G31 - Skyartec X3V - mCPX V2 (M5/10A-HK) - Skyartec WNCPX BL - WL Toys V911/Y911/V929 (a prendere polvere sullo scaffale) - Super Mono X | ||
|
| |
|
30 aprile 14, 16:25
| #440 (permalink) Top | |
| User Data registr.: 30-08-2012 Residenza: Bracciano (RM)
Messaggi: 696
| Citazione:
ma nel discorso di "abbassare la testa" forse mi sono spiegato male intendevo infatti quello che dici nell'ultima frase <<Se metti l'albero al contrario, l'estremita' ti va a sbattere contro lo spindle e non riesci a mettere la vite>> quindi se tagli via i 3-4 mm di albero questo non sbatte più sullo spindle e abbassi il tutto. Ovviamente va riposizionato il collarino e rilivellato il piatto in modo che i servi lavorano correttamente e, soprattutto, a tutto + e tutto - il piatto non va a sbattere ne sull'hub ne sul collarino. Non so se si guadagna in termini di risposta nelle manovre
__________________ mcpx v2 full brushless; 130x/180cfx/230s ; OXY4 e OXY3 con Brain2; DX9-Devo10-Radiomaster TX16s[/B] Heli-X & Phoenix 5 simulators | |
|
| |
 |
| Bookmarks |
| |
 Discussioni simili
Discussioni simili | ||||
| Discussione | Autore discussione | Forum | Commenti | Ultimo Commento |
| Skyartec wasp 100 | TerminatorTN | Elimodellismo Principianti | 14 | 17 ottobre 12 23:26 |
| skyartec wasp v3 | rox87 | Elimodellismo Principianti | 15 | 16 ottobre 12 22:14 |
| Mini Twister Sport o Skyartec Wasp 100 mini??? | Stefano.c.br | Elimodellismo Principianti | 1 | 20 aprile 12 19:57 |
| Wasp V3 | dado1979 | Elimodellismo Motore Elettrico | 6 | 09 settembre 10 18:14 |
| Wasp W3 | pippo94 | Elimodellismo Principianti | 2 | 30 aprile 08 10:19 |







 Modalità lineare
Modalità lineare

