
- Contenuti
- Community
- Risorse
- Varie

| |
 25 aprile 20, 17:29
25 aprile 20, 17:29
| #22 (permalink) Top | |
| Guest Data registr.: 17-07-2013
Messaggi: 3.734
| Citazione:
") ad ogni modo si, al momento fa il ciclo completo se si sorpassa il centro.. sarebbe meglio riposizionasse al centro indipendentemente dalla posizione di loop nella quale si trova. ad ogni modo l'ho montato sul camion almeno posso tarare la corsa del servo. poi ora un amico mi ha messo in testa la possibilità di assegnare a una posizione aux il segnale di sterzo invece che fare un loop.. ovvero avere la posizione fissa avanti per guidare e come seconda posizione poter scegliere di sterzare contemporaneamente alla cam. anche questa sarebbe una soluzione interessante, per darsi una guardata attorno almeno da fermo girando ruote e cam assieme. Ultima modifica di wrighizilla : 25 aprile 20 alle ore 17:32 | |

|  |
|
25 aprile 20, 17:46
| #23 (permalink) Top |
| User Data registr.: 02-07-2004 Residenza: Ronchi dei Legionari (GO)
Messaggi: 5.665
|
L' interruttore quante posizioni ha? Valori delle letture? Valori delle letture servo sterzo? int rxpulse; void setup() { Serial.begin(9600); } void loop() { rxpulse = pulseIn(8, HIGH); Serial.println(rxpulse); }
__________________ Solo Aeromodelli - Autogiro Elicotteri Multirotori No grazie |
|
| |
|
25 aprile 20, 18:34
| #24 (permalink) Top | |
| Guest Data registr.: 17-07-2013
Messaggi: 3.734
| Citazione:
valori letture aux e sterzo sono simili: 1000 1900 ho provato adesso l'ultimo sketch che hai postato  molto piacevole avere anche la pausa al centro, funziona benissimo, ho allargato la corsa del servo e centrato la visuale, la velocità l'ho alzata a 30. grazie non resta che provarlo sul campo per vedere quanto risulta pratico ma direi che va una meraviglia.
| |
|
| |
|
27 aprile 20, 11:34
| #25 (permalink) Top |
| Guest Data registr.: 17-07-2013
Messaggi: 3.734
|
il loop è fantastico, ti ringrazio ancora per l'aiuto, penso di aver imparato qualcosa da questa esperienza anche solo facendo banali confronti adesso sto cercando di costruire una controller per radiocomandi 2 canali in modo da avere 4 ruote sterzanti e poter programmare le posteriori settando la centratura, il reverse e la corsa disponibile. sono arrivato qui, lo sketch adesso permette di settare reverse e corsa del servo ma non la centratura che ovviamente dovrà essere mantenuta proporzionale. #include <Servo.h> Servo myservo; unsigned int rxpulse; unsigned int newPos; void setup() { myservo.attach(10); pinMode(8, INPUT); } void loop() { rxpulse = pulseIn(8, HIGH); newPos = map(pulseIn(8, HIGH), 1000, 2000, 5, 175); myservo.write(newPos); } questo sketch vorrei che potesse sostituire il classico cavetto a Y dando il modo di settare i parametri di sterzo necessari a gestire la coppia di ruote posteriori. vediamo se ci riuscirò, credo di avere abbastanza chiaro cosa manca ma ancora non l'ho saputo scrivere bene. Ultima modifica di wrighizilla : 27 aprile 20 alle ore 11:38 |
|
| |
|
29 aprile 20, 01:55
| #26 (permalink) Top |
| Guest Data registr.: 17-07-2013
Messaggi: 3.734
|
risolto lo sketch per gestire alla meglio il servo posteriore 4ws con una radio 2ch. permette di centrare lo sterzo, decidere gli endpoint e reversare il servo funziona bene e adesso finisce sul camion  https://pastebin.com/s27QJ37c questo lo schema 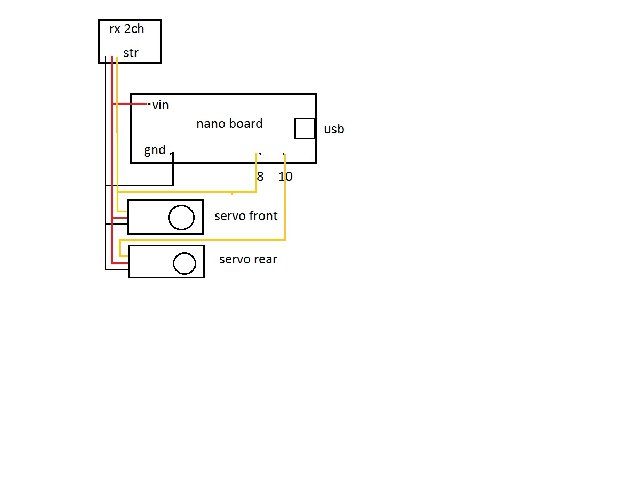  |
|
| |
|
29 aprile 20, 07:35
| #27 (permalink) Top |
| User Data registr.: 02-10-2019 Residenza: Orvieto
Messaggi: 293
|
Ciao, se posso permettermi ti do un suggerimento... Sulla riga 38 leggi il valore del canale sterzo e lo memorizzi sulla variabile rxpulse, poi sulla riga 39 fai leggere all'arduino lo stesso valore all'interno dell'operazione map. Il tutto funziona lo stesso ma potresti inserire rxpulse all'interno di map per snellire il ciclo ed evitare la stessa lettura due volte. Inviato dal mio PRA-LX1 utilizzando Tapatalk |
|
| |
|
29 aprile 20, 10:17
| #28 (permalink) Top | |
| Guest Data registr.: 17-07-2013
Messaggi: 3.734
| Citazione:
compreso se vi viene a mente qualche caratteristica aggiuntiva utile al progetto oppure volete riscriverlo e migliorarlo. avevo pensato di aggiungere la lettura del canale del gas in modo da renderlo inversamente proporzionale ai gradi di sterzata, in questo modo più dai gas e meno sterzo posteriore avresti... fino al massimo di velocità nella quale sei di fatto 2 ruote sterzanti. questo potrebbe servire per avere parecchio sterzo quando si va piano tra ostacoli mentre eviterebbe di cappottare curvando in velocità. potrebbe essere il prossimo passaggio, sempre se riesco a scriverlo  grazie ancora a tutti quelli che mi stanno aiutando, per merito vostro sono riuscito a muovere i primi passi in un ambiente che fino alla settimana scorsa mi spaventava solamente. ho cambiato la stringa così: rxpulse = pulseIn(8, HIGH); newPos = map(rxpulse, antsx, antdx,postsx, postdx); Ultima modifica di wrighizilla : 29 aprile 20 alle ore 10:26 | |
|
| |
|
29 aprile 20, 12:42
| #29 (permalink) Top | |
| User Data registr.: 02-10-2019 Residenza: Orvieto
Messaggi: 293
| Citazione:
 Per lo sterzo proporzionale al gas sicuramente si può fare con poche righe aggiuntive e un cavetto a y per portare all'arduino il canale del gas. Nel pomeriggio scrivo di nuovo perché adesso non posso... Ciao Inviato dal mio PRA-LX1 utilizzando Tapatalk | |
|
| |
|
29 aprile 20, 18:55
| #30 (permalink) Top | |
| User Data registr.: 02-10-2019 Residenza: Orvieto
Messaggi: 293
| Citazione:
il risultato dovrebbe essere una correzione lineare che va da 0 a "max_correction" gradi. Fai le tutte le prove del caso prima di andare in pista  Spero di esserti stato di aiuto.. PS: secondo me questa discussione starebbe meglio nella sezione Elettronica  | |
|
| |
 |
| Bookmarks |
| |
 Discussioni simili
Discussioni simili | ||||
| Discussione | Autore discussione | Forum | Commenti | Ultimo Commento |
| buggy da completare | BoBoPoP | Automodellismo Mot. Scoppio Off-Road | 41 | 18 maggio 16 16:56 |
| monster da completare...! | bronto_19 | Automodellismo Mot. Elettrico Off-Road | 2 | 22 giugno 10 16:35 |
| Sto costruendo uno schiumino (o tzagi), mi aiutate??? | crido96 | Aeromodellismo Principianti | 72 | 07 febbraio 10 01:26 |
| Come completare una associated B4? | ryan-j | Automodellismo Mot. Elettrico On-Road | 9 | 04 maggio 08 10:55 |







 Modalità lineare
Modalità lineare

