Cercando nel forum ho visto che non ci sono molti build log di tricotteri e in particolare il tricottero sembra essere una configurazione poco utilizzata nell'ambito dei multicotteri con sistema di controllo basato sul software APMcopter.
L'idea è quindi di realizzare un semplice ed economico tricottero per provare, in questa configurazione poco usata, le varie ed interessanti funzionalità di volo assistito garantite da APMcopter.
Il sito di riferimento da cui trarre ispirazione è naturalmente quello di David:
The Tricopter V2.5 | RC Explorer
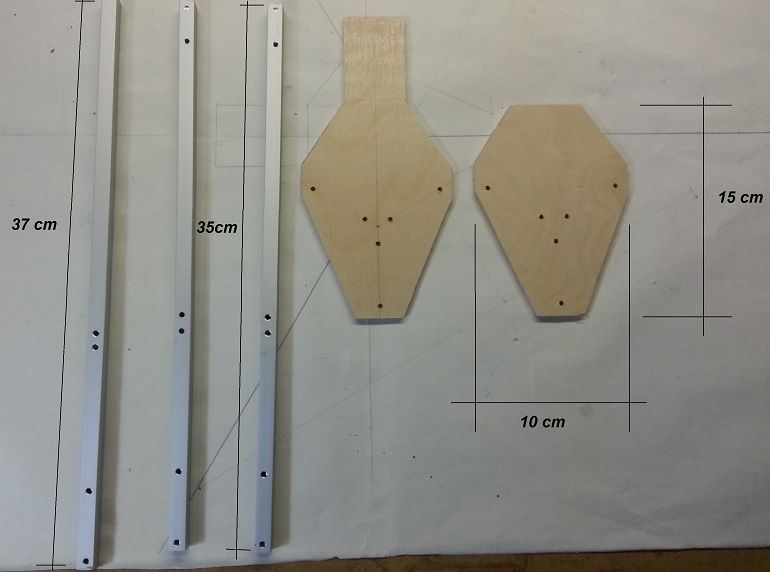
cercando però di realizzare un tricottero un poco più piccolo in modo da essere meno ingombrante anche se lasciato montato (non ripiegato).
L'idea è quindi di realizzare un semplice ed economico tricottero per provare, in questa configurazione poco usata, le varie ed interessanti funzionalità di volo assistito garantite da APMcopter.
Il sito di riferimento da cui trarre ispirazione è naturalmente quello di David:
The Tricopter V2.5 | RC Explorer
cercando però di realizzare un tricottero un poco più piccolo in modo da essere meno ingombrante anche se lasciato montato (non ripiegato).












Commenta