Ciao a tutti, apro questo thread per tutti coloro che posseggono o vorrebbero acquistare una scheda VRBRAIN prodotta e sviluppata da VirtualRobotix, una comunity open-source e open-hardware che ha come obiettivo lo sviluppo e la ricerca di strumenti per il controllo autonomo di mezzi aerei, terrestri e marini.
VBrain Coming ... the ARM Cortex M4 revolution - FOXTEAM UAV CLAN
Qui posterò le mie personali informazioni, le novità, i video e i test che verranno effettuati sulla piattaforma VRBRAIN per i multirotori ed eventualmente notizie riguardo il port e lo sviluppo di software per altri mezzi.
Ovviamente esiste anche un forum dove si possono affrontare temi un po' più tecnici che si trova qui a cui consiglio caldamente di iscriversi: Discussion Forum - FOXTEAM UAV CLAN
Per chi non la conoscesse ancora ecco un paio di specifiche "core"
- 168Mhz ARM CortexM4F microcontroller con DSP e hardware per il calcolo in virgola mobile.
- 1024KiB di memoria flash, 192KiB di RAM.
- Accelerometro e giroscopio MEMS su tre assi (MPU6000), bussola su tre assi (HMC3883), sensore barometrico di pressione assoluta (MS5611).
- 7 Input standard PPM , PPMSUM o SBUS (8 teorici)
- 8 Output a 490 hz
- 1 Data Flash ad alta velocità da 1MB per il salvataggio di log in tempo reale.
- 1 Can bus 2 i2c Bus
- 2 SPI
- 3 Seriali: 1 per GPS, 1 per telemetria e 1 per usi generici.
- 3 Switch digitali (ULN2003) per il controllo di apparati con voltaggio > 5V (es. LED, Buzzer etc.)
- Supporto JTAG per il debug su scheda in realtime.
- 1 sonar input.
- 1 Input per il controllo del voltaggio della batteria.
- Misure 6x4 cm
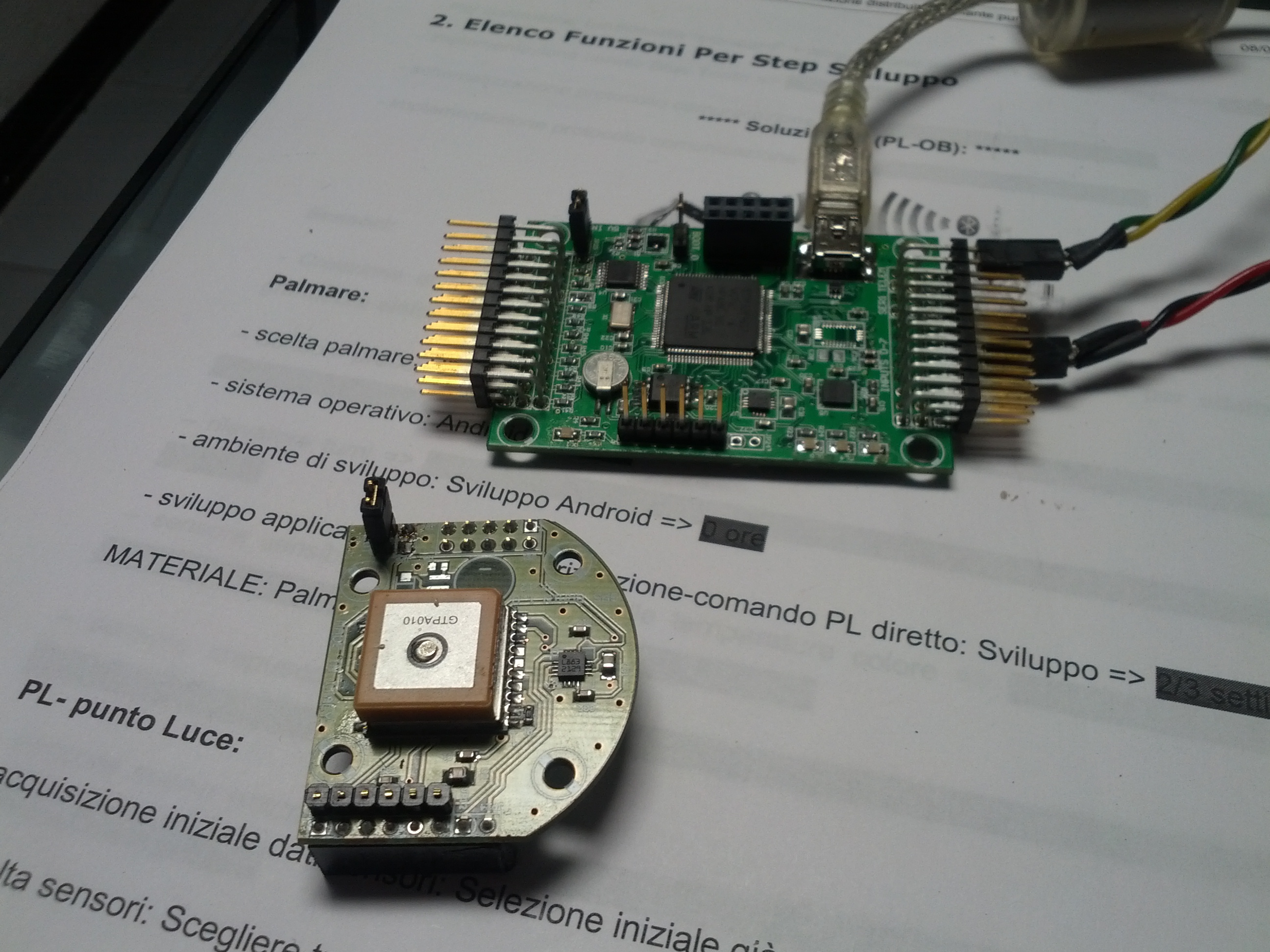
La VRBRAIN supporta nativamente (e può essere fornita di) GPS: GTop 3329(chipset Mediatek 3329), Fastrax IT600 o del più performante UBLOX LEA6-H
[IMG]http://api.ning.com/files/Pj4K7-vu1gaSy14AeaEwtXwsDIoZ0ftNBivAyb4nRakRoNmt63ut8wA9 b1YpKxhSinlVPUWWhyb4kQZymC4TWlNan2AR*8M9/IMG_20120719_165632.jpg[/IMG]
La VRBRAIn nasce come evoluzione della MP32 e si indirizza ad un mercato più consumer e meno da "ricerca scientifica". Gli input/output infatti sono molti meno della sorella MP32V3F4 (che condivide lo stesso schema e Micro), e offre un format più compatto e appetibile per i mezzi radiocomandati.
Attualmente la scheda è testata con il firmware Arducopter32 2.9 per multirotori che è un port del famoso firmware Arducopter su piattaforma ARM, sviluppato da me, Roberto (RedFox74), Alberto Vaccariello con contributi della comunity VirtualRobotix.com
Le prestazioni rispetto all'Arduino di Arducopter sono senza termini di paragone.
Per citarne un paio:
Arduino gira con il loop principale a 100Hz utilizzando il 90/95% di CPU(ultimamente stanno pensando di diminuirlo a 50 o 60Hz...) , VRBRAIN gira a 400Hz ed usa solo il 10% di CPU time.
I dati di giroscopio ed accelerometro in Arduino sono campionati a 200Hz, con VRBRAIN sono campionati a 1KHz...
La IDE di sviluppo si basa su Eclipse e il codice è disponibile su: vrbrain - VitualRobotix VRBrain repository - Google Project Hosting
Ho messo in piedi un mini sito su wordpress per iniziare a mettere giù un paio di guide, semplici ma dirette senza troppi fronzoli. E' ancora tutto "work in progress" ma conto di mettere sufficienti informazioni a breve per chi volesse cominciare da 0.
Questo è il link: vrbrain | Everything you wanted to know but never asked
Per ora è tutto in inglese, magari a breve lo tradurrò anche in Italiano.
Come dicevo la scheda è principalmente usata per i mezzi multirotori (Tri, quad, hexa, Octo e Y6), ma siamo a buon punto con il port del codice per Rover terrestri, Barche a motore, Aeroplani. Ci sono anche progetti per stampanti 3D e palloni aerostatici... insomma una scheda a 360°.
Sono stati fatti anche dei port del firmware di AutoQuad e OpenPilot, brevemente testati, che usano Micro uguali e sensori simili, solo che il tempo a disposizione per i test e per lo sviluppo di quelle piattaforme non è molto.
Con il firmware attuale, la scheda si comporta davvero bene. Sono state testate tutte le funzionai automatiche tra cui:
- Loiter: mantenimento della posizione orizzontale e verticale.
- Altitude hold: mantenimento della posizione verticale con completo controllo del moviemnto sugli assi x e y
- Cricle: effettua un cerchio con raggio impostabile puntando il muso sempre al centro
- RTL: ritorno automatico al punto con atterraggio o posizionamento a 2m. di quota
- AUTO: missioni complete con Waipoint (max 256), decollo e atterraggio in autonomia
Sono state testate le modalità di volo stabile ed ACRO.
La modalità di volo ACRO offre un opzione (ACRO TRAINER) per il principiante e permette un controllo tipo ACRO con limiti in Roll e pitch impostabili e con una funzione di autolivellamento con velocità impostabile.
Il controlo di altitudine automatico oramai è molto simile alla NAZA e permette una controllo molto preciso della quota. Infatti con i recenti sviluppi è stato introdotto il controllo della quota con l'ausilio degli accelerometri.
A breve verrà rilasciata una f unzione per il controllo della posizione con l'ausilio di accelerometri e giroscopi come avviene nella NAZA in modalità ATTI.
Punto di forza della VRBRAIN con il codice Arducopter32 è il FlightPlanner, strunmento per la calibrazione del mezzo e per la gestione dei parametri di volo. Da questo strumento è possibile anche impostare i piani di volo con Waypoint come mostrato in questa immagine:
[IMG]http://api.ning.com/files/*DEkYWZfFVBdYNi1ytH9Gxvhvir2s5KvR*7X*h4AwoQ3u2stPw ZkDJ3TZYil5OmFItfQpKWiS8SXDnxEzlRI*P1iw6DAaN4w/arm2.png[/IMG]
e questo è il risultato del volo autonomo che segue il percorso impostato mostrato su Google Earth:
[IMG]http://api.ning.com/files/1tnLF-D6XqZCW-LpWX4gnDmmCkfx*p2EgnWmNp0QcbvUOAZKJx-4Jp19iGKS9NIcNCnTnbt8LHutAbjbIf0jzBWPepagYfWS/arm.jpg[/IMG]
E questi son un paio di video della ultima release:
VBrain Coming ... the ARM Cortex M4 revolution - FOXTEAM UAV CLAN
Qui posterò le mie personali informazioni, le novità, i video e i test che verranno effettuati sulla piattaforma VRBRAIN per i multirotori ed eventualmente notizie riguardo il port e lo sviluppo di software per altri mezzi.
Ovviamente esiste anche un forum dove si possono affrontare temi un po' più tecnici che si trova qui a cui consiglio caldamente di iscriversi: Discussion Forum - FOXTEAM UAV CLAN
Per chi non la conoscesse ancora ecco un paio di specifiche "core"
- 168Mhz ARM CortexM4F microcontroller con DSP e hardware per il calcolo in virgola mobile.
- 1024KiB di memoria flash, 192KiB di RAM.
- Accelerometro e giroscopio MEMS su tre assi (MPU6000), bussola su tre assi (HMC3883), sensore barometrico di pressione assoluta (MS5611).
- 7 Input standard PPM , PPMSUM o SBUS (8 teorici)
- 8 Output a 490 hz
- 1 Data Flash ad alta velocità da 1MB per il salvataggio di log in tempo reale.
- 1 Can bus 2 i2c Bus
- 2 SPI
- 3 Seriali: 1 per GPS, 1 per telemetria e 1 per usi generici.
- 3 Switch digitali (ULN2003) per il controllo di apparati con voltaggio > 5V (es. LED, Buzzer etc.)
- Supporto JTAG per il debug su scheda in realtime.
- 1 sonar input.
- 1 Input per il controllo del voltaggio della batteria.
- Misure 6x4 cm
La VRBRAIN supporta nativamente (e può essere fornita di) GPS: GTop 3329(chipset Mediatek 3329), Fastrax IT600 o del più performante UBLOX LEA6-H
[IMG]http://api.ning.com/files/Pj4K7-vu1gaSy14AeaEwtXwsDIoZ0ftNBivAyb4nRakRoNmt63ut8wA9 b1YpKxhSinlVPUWWhyb4kQZymC4TWlNan2AR*8M9/IMG_20120719_165632.jpg[/IMG]
La VRBRAIn nasce come evoluzione della MP32 e si indirizza ad un mercato più consumer e meno da "ricerca scientifica". Gli input/output infatti sono molti meno della sorella MP32V3F4 (che condivide lo stesso schema e Micro), e offre un format più compatto e appetibile per i mezzi radiocomandati.
Attualmente la scheda è testata con il firmware Arducopter32 2.9 per multirotori che è un port del famoso firmware Arducopter su piattaforma ARM, sviluppato da me, Roberto (RedFox74), Alberto Vaccariello con contributi della comunity VirtualRobotix.com
Le prestazioni rispetto all'Arduino di Arducopter sono senza termini di paragone.
Per citarne un paio:
Arduino gira con il loop principale a 100Hz utilizzando il 90/95% di CPU(ultimamente stanno pensando di diminuirlo a 50 o 60Hz...) , VRBRAIN gira a 400Hz ed usa solo il 10% di CPU time.
I dati di giroscopio ed accelerometro in Arduino sono campionati a 200Hz, con VRBRAIN sono campionati a 1KHz...
La IDE di sviluppo si basa su Eclipse e il codice è disponibile su: vrbrain - VitualRobotix VRBrain repository - Google Project Hosting
Ho messo in piedi un mini sito su wordpress per iniziare a mettere giù un paio di guide, semplici ma dirette senza troppi fronzoli. E' ancora tutto "work in progress" ma conto di mettere sufficienti informazioni a breve per chi volesse cominciare da 0.
Questo è il link: vrbrain | Everything you wanted to know but never asked
Per ora è tutto in inglese, magari a breve lo tradurrò anche in Italiano.
Come dicevo la scheda è principalmente usata per i mezzi multirotori (Tri, quad, hexa, Octo e Y6), ma siamo a buon punto con il port del codice per Rover terrestri, Barche a motore, Aeroplani. Ci sono anche progetti per stampanti 3D e palloni aerostatici... insomma una scheda a 360°.
Sono stati fatti anche dei port del firmware di AutoQuad e OpenPilot, brevemente testati, che usano Micro uguali e sensori simili, solo che il tempo a disposizione per i test e per lo sviluppo di quelle piattaforme non è molto.
Con il firmware attuale, la scheda si comporta davvero bene. Sono state testate tutte le funzionai automatiche tra cui:
- Loiter: mantenimento della posizione orizzontale e verticale.
- Altitude hold: mantenimento della posizione verticale con completo controllo del moviemnto sugli assi x e y
- Cricle: effettua un cerchio con raggio impostabile puntando il muso sempre al centro
- RTL: ritorno automatico al punto con atterraggio o posizionamento a 2m. di quota
- AUTO: missioni complete con Waipoint (max 256), decollo e atterraggio in autonomia
Sono state testate le modalità di volo stabile ed ACRO.
La modalità di volo ACRO offre un opzione (ACRO TRAINER) per il principiante e permette un controllo tipo ACRO con limiti in Roll e pitch impostabili e con una funzione di autolivellamento con velocità impostabile.
Il controlo di altitudine automatico oramai è molto simile alla NAZA e permette una controllo molto preciso della quota. Infatti con i recenti sviluppi è stato introdotto il controllo della quota con l'ausilio degli accelerometri.
A breve verrà rilasciata una f unzione per il controllo della posizione con l'ausilio di accelerometri e giroscopi come avviene nella NAZA in modalità ATTI.
Punto di forza della VRBRAIN con il codice Arducopter32 è il FlightPlanner, strunmento per la calibrazione del mezzo e per la gestione dei parametri di volo. Da questo strumento è possibile anche impostare i piani di volo con Waypoint come mostrato in questa immagine:
[IMG]http://api.ning.com/files/*DEkYWZfFVBdYNi1ytH9Gxvhvir2s5KvR*7X*h4AwoQ3u2stPw ZkDJ3TZYil5OmFItfQpKWiS8SXDnxEzlRI*P1iw6DAaN4w/arm2.png[/IMG]
e questo è il risultato del volo autonomo che segue il percorso impostato mostrato su Google Earth:
[IMG]http://api.ning.com/files/1tnLF-D6XqZCW-LpWX4gnDmmCkfx*p2EgnWmNp0QcbvUOAZKJx-4Jp19iGKS9NIcNCnTnbt8LHutAbjbIf0jzBWPepagYfWS/arm.jpg[/IMG]
E questi son un paio di video della ultima release:


")

Commenta