Componenti usati:
Telaio Hercules H500;
Ammortizzatori in FOAM originali Walkera TALI 500;
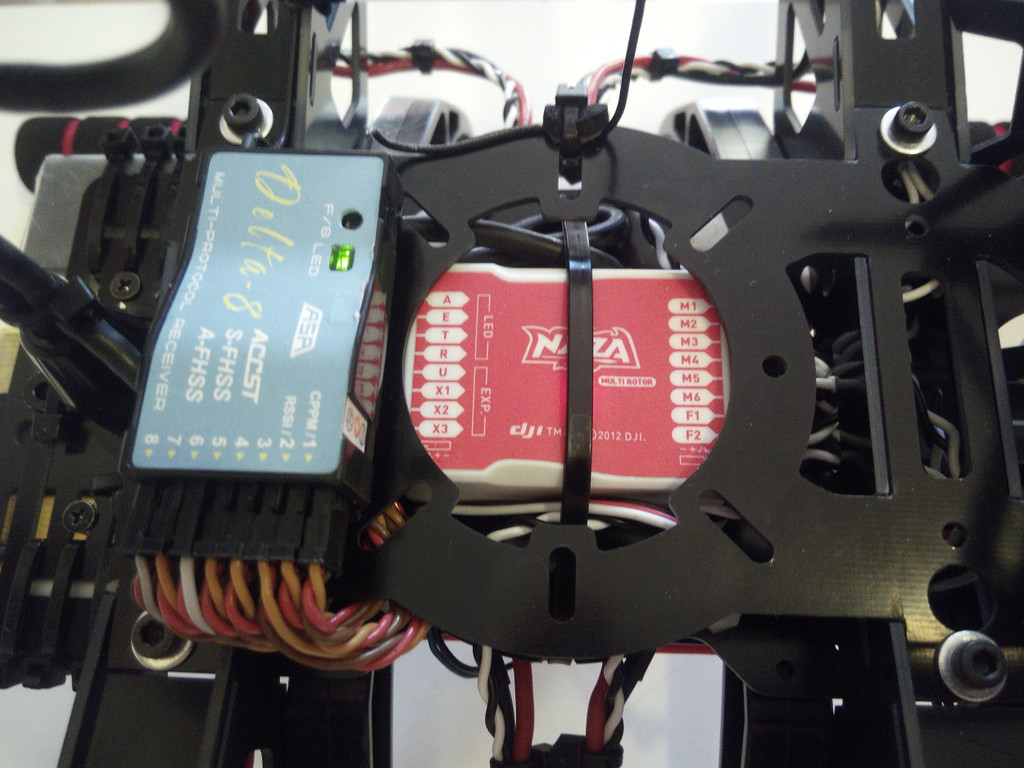
Modulo RX Frysky 8 canali;
Centralina NAZA Lite riflashata V2 con bios 4.02;
GPS NAZA;
Motori T-Motor MN3110/15 780KV;
ESC 40A Hobbywing X-Rotor;
Eliche Aeronaut 10x5;
Gimbal Walkera G-2D;
Fotocamera Ilook+;
Batteria Lipo 460 mAh 3s nano-tech (per alimentare i 57 LEDs di posizione);
Batteria Lipo 5000 mah 4s Full Power Gold Edition;
Peso totale: 2.05 kg
Radiocomando: Futaba T9CHP con batterie Eneloop black pro;
FPV: Occhiali Carl Zeiss Cinemizer modificati con ricevente RC808.
Il motivo del "v1.3" e' dovuto al fatto che questo drone e' stato riassemblato completamente per
ben 3 volte!
Originariamente il drone fu costruito da Capripiu', poi a causa di un danno avvenuto durante il
trasporto e per una incompatibilita' tra componenti creatasi nel passaggio da una batteria 3s ad
una 4s, dopo i classici rattoppi poco professionali che si tentano sempre di fare per non dover
rimettere mano a tutto l' ambaradan, ho deciso di smontare tutto quanto fino all' ultima vite ed
intraprendere una progettazione ex-novo di tutto il drone.
Io sono un tipo molto pignolo: non sopporto di vedere cavi volanti, intrecciati o passati male,
e non sopporto nemmeno di trovare viti spaiate, sfilettate, spezzate o mancanti del tutto, cosi'
mi sono armato di santa pazienza ed ho fatto ogni cosa a regola d'arte, rasentando il maniacale.
Grazie all' aiuto di vari utenti di questo forum, che elenchero' con eterna gratitudine alla fine
di questo post, ho realizzato un vero e proprio capolavoro: il drone ora e' stabile, reattivo,
veloce e discretamente silenzioso (almeno quando e' in hovering :rolleyes).
Ho effettuato tutte le tarature e settaggi necessari, ma non ho ancora messo mano al bilanciamento
delle eliche e dei motori, ma appena mi sara' possibile effettuero' un bilanciamento dinamico con
un vibrometro apposito che ho aquistato di recente su eBay.
Il baricentro del modello e' perfetto, e l'ho ottenuto semplicemente spostando di circa 3 cm il
pacco batterie verso il retro del drone.
La bilanciatura e' stata resa necessaria per via del peso extra della telecamera posta sul muso
del drone.
Non ho dovuto nemmeno toccare i settaggi del gain: sono tutti settati a 100%.
La durata della batteria e' eccellente: circa 15 minuti di guida mista (decolli, hovering, partenze
a razzo, frenate ed atterraggi).
La batteria utilizzata per i LEDs dura piu' di 1 ora, quindi posso utilizzarla per 4 voli abbondanti
senza bisogno di ricaricarla ogni volta.
Volando per 15 minuti in un ambiente molto caldo (circa 30 gradi con umidita' elevata), i motori e
gli ESCs al tatto erano appena tiepidi, segno che stavano lavorando abbondantemente sotto la soglia
dei valori massimi consentiti.
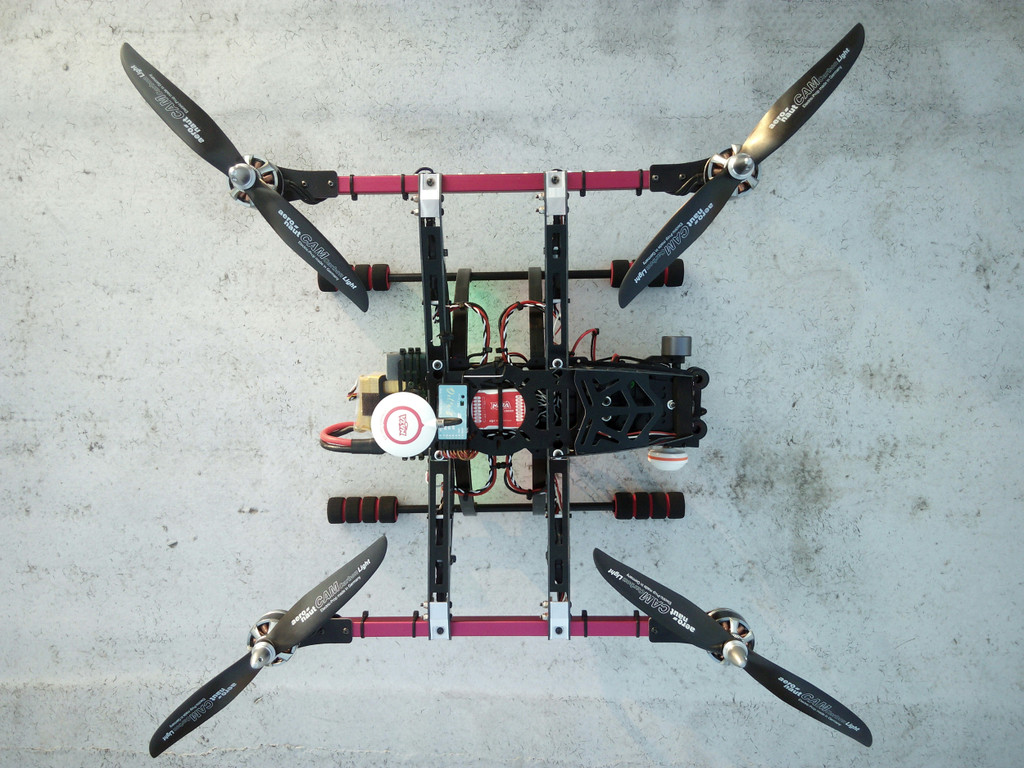
Ma cominciamo con le foto ...
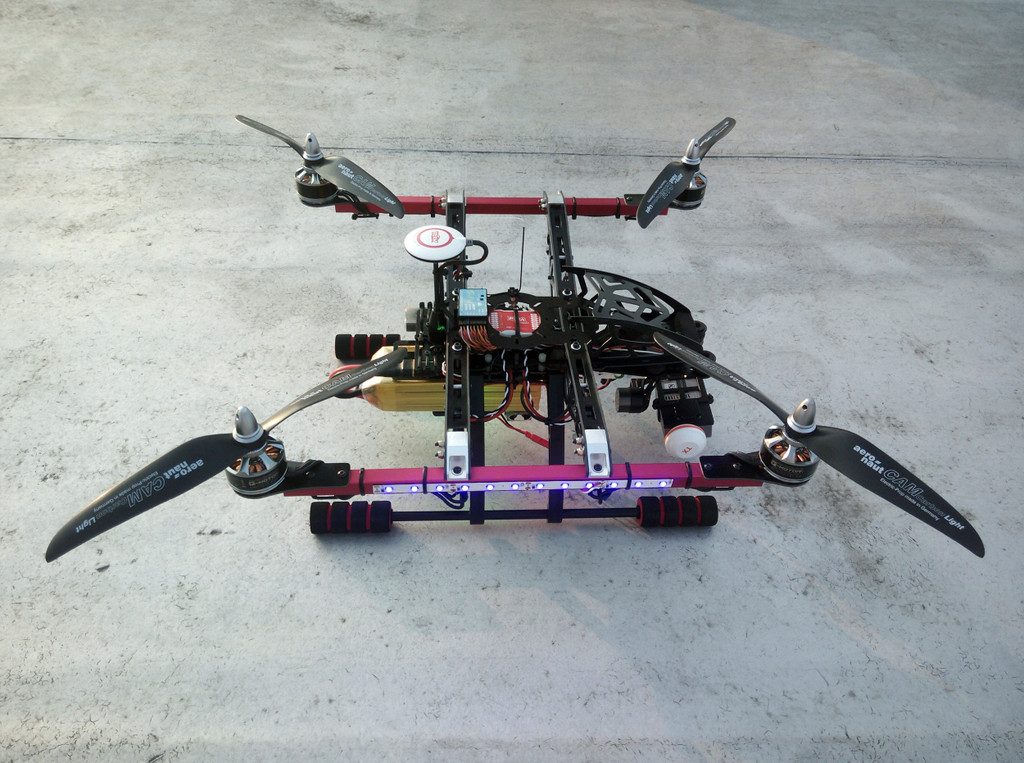
Un bel primo piano:

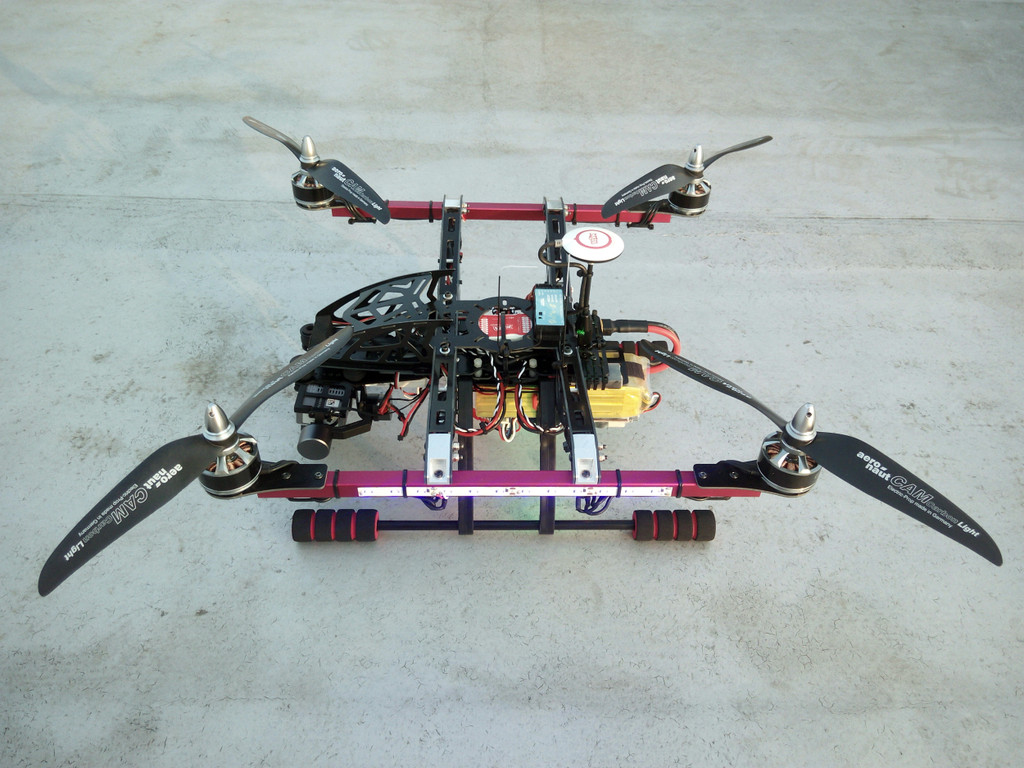
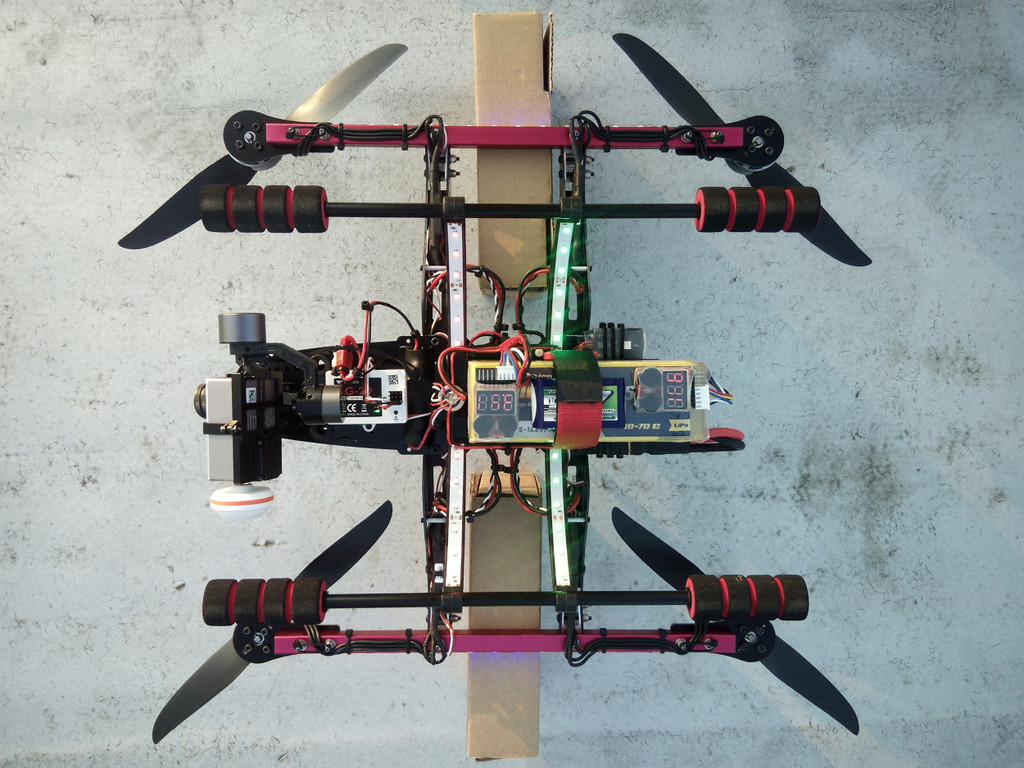
Viste laterali:
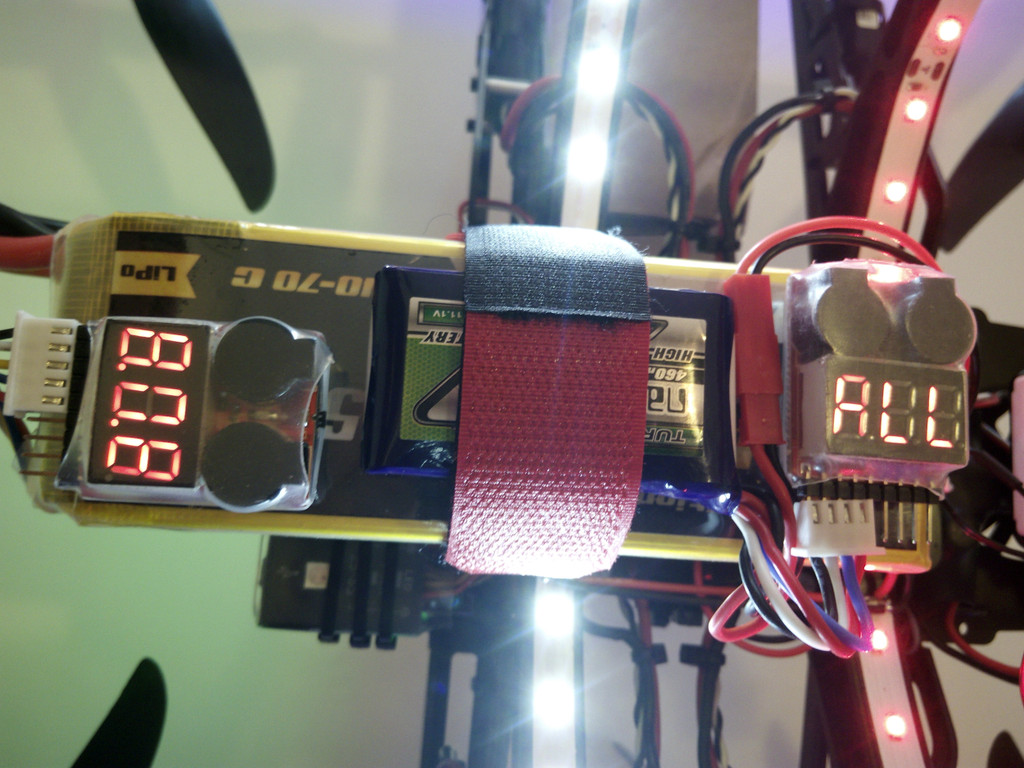
Batterie e cicalini:
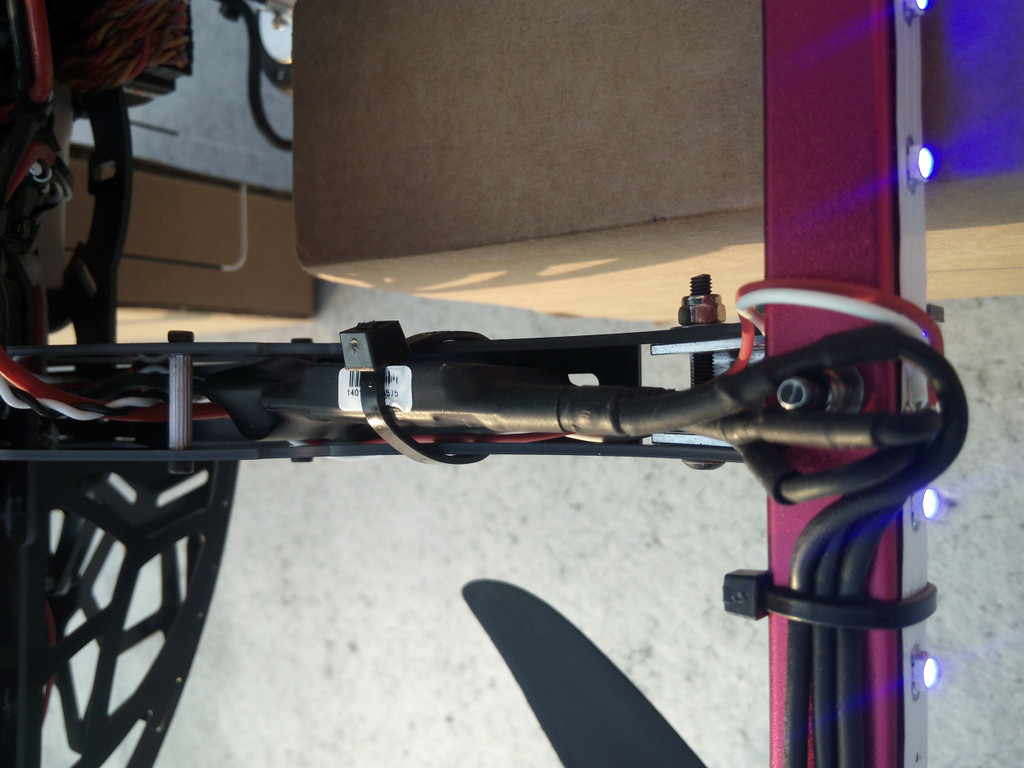
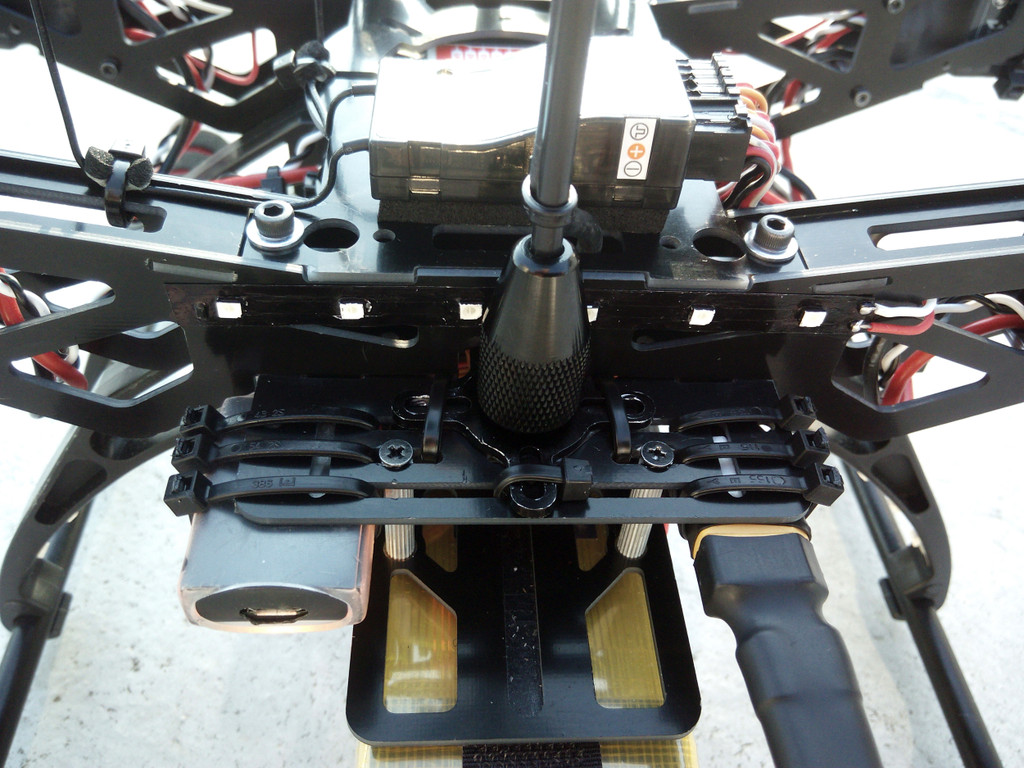
ESCs:

iLook+:

Radiocomando Futaba:

Nonostante tutti i guai e gli inconvenienti che avuto per la realizzazione di questo
prototipo, devo ammettere che come primo multirotore mi e' riuscito fin troppo bene, e ne sono proprio soddisfatto!
E come anticipato prima, ringrazio di tutto cuore:
- Capripiu' per avermi venduto il primo modello e per avermi messo "le mani in pasta" (ed una buona scorta di liquori artigianali in frigo) ;-)
- Bladeslap per aver integrato e completato tutti gli insegnamenti di Capripiu';
- Bandit per i consigli sugli ESCs;
- Laser02 per alcuni preziosi consigli tecnici e per le infos sulle eliche;
- Aduken e lo staff di T-motor (Eva ed Anki) per i consigli sui motori.
.. spero di non aver dimenticato proprio nessuno!
Si accettano complimenti ma anche critiche, specie se costruttive! (°_°)
Riccardo.
Telaio Hercules H500;
Ammortizzatori in FOAM originali Walkera TALI 500;
Modulo RX Frysky 8 canali;
Centralina NAZA Lite riflashata V2 con bios 4.02;
GPS NAZA;
Motori T-Motor MN3110/15 780KV;
ESC 40A Hobbywing X-Rotor;
Eliche Aeronaut 10x5;
Gimbal Walkera G-2D;
Fotocamera Ilook+;
Batteria Lipo 460 mAh 3s nano-tech (per alimentare i 57 LEDs di posizione);
Batteria Lipo 5000 mah 4s Full Power Gold Edition;
Peso totale: 2.05 kg
Radiocomando: Futaba T9CHP con batterie Eneloop black pro;
FPV: Occhiali Carl Zeiss Cinemizer modificati con ricevente RC808.
Il motivo del "v1.3" e' dovuto al fatto che questo drone e' stato riassemblato completamente per
ben 3 volte!
Originariamente il drone fu costruito da Capripiu', poi a causa di un danno avvenuto durante il
trasporto e per una incompatibilita' tra componenti creatasi nel passaggio da una batteria 3s ad
una 4s, dopo i classici rattoppi poco professionali che si tentano sempre di fare per non dover
rimettere mano a tutto l' ambaradan, ho deciso di smontare tutto quanto fino all' ultima vite ed
intraprendere una progettazione ex-novo di tutto il drone.
Io sono un tipo molto pignolo: non sopporto di vedere cavi volanti, intrecciati o passati male,
e non sopporto nemmeno di trovare viti spaiate, sfilettate, spezzate o mancanti del tutto, cosi'
mi sono armato di santa pazienza ed ho fatto ogni cosa a regola d'arte, rasentando il maniacale.
Grazie all' aiuto di vari utenti di questo forum, che elenchero' con eterna gratitudine alla fine
di questo post, ho realizzato un vero e proprio capolavoro: il drone ora e' stabile, reattivo,
veloce e discretamente silenzioso (almeno quando e' in hovering :rolleyes).
Ho effettuato tutte le tarature e settaggi necessari, ma non ho ancora messo mano al bilanciamento
delle eliche e dei motori, ma appena mi sara' possibile effettuero' un bilanciamento dinamico con
un vibrometro apposito che ho aquistato di recente su eBay.
Il baricentro del modello e' perfetto, e l'ho ottenuto semplicemente spostando di circa 3 cm il
pacco batterie verso il retro del drone.
La bilanciatura e' stata resa necessaria per via del peso extra della telecamera posta sul muso
del drone.
Non ho dovuto nemmeno toccare i settaggi del gain: sono tutti settati a 100%.
La durata della batteria e' eccellente: circa 15 minuti di guida mista (decolli, hovering, partenze
a razzo, frenate ed atterraggi).
La batteria utilizzata per i LEDs dura piu' di 1 ora, quindi posso utilizzarla per 4 voli abbondanti
senza bisogno di ricaricarla ogni volta.
Volando per 15 minuti in un ambiente molto caldo (circa 30 gradi con umidita' elevata), i motori e
gli ESCs al tatto erano appena tiepidi, segno che stavano lavorando abbondantemente sotto la soglia
dei valori massimi consentiti.
Ma cominciamo con le foto ...
Un bel primo piano:
Viste laterali:
Batterie e cicalini:
ESCs:
iLook+:
Radiocomando Futaba:
Nonostante tutti i guai e gli inconvenienti che avuto per la realizzazione di questo
prototipo, devo ammettere che come primo multirotore mi e' riuscito fin troppo bene, e ne sono proprio soddisfatto!
E come anticipato prima, ringrazio di tutto cuore:
- Capripiu' per avermi venduto il primo modello e per avermi messo "le mani in pasta" (ed una buona scorta di liquori artigianali in frigo) ;-)
- Bladeslap per aver integrato e completato tutti gli insegnamenti di Capripiu';
- Bandit per i consigli sugli ESCs;
- Laser02 per alcuni preziosi consigli tecnici e per le infos sulle eliche;
- Aduken e lo staff di T-motor (Eva ed Anki) per i consigli sui motori.
.. spero di non aver dimenticato proprio nessuno!
Si accettano complimenti ma anche critiche, specie se costruttive! (°_°)
Riccardo.





Commenta