Ciao a tutti oramai i frame incominciano a essere molti di varie forme ,mi sono permesso di aprire questo 3d, per racchiudere le vari geometrie di frame che spopolano sul nostro mercato ,in modo da poter discuterne ed aiutare chi come me si spinge ad autocostruirsi un drone.
-
-
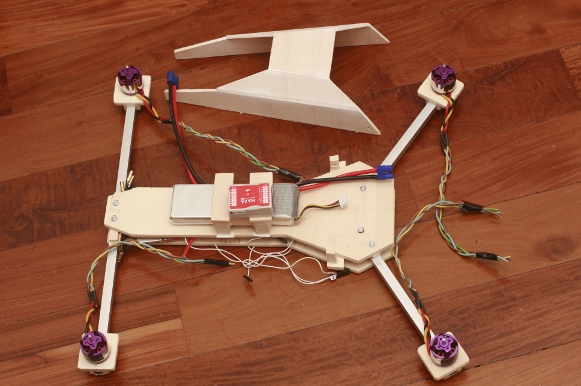
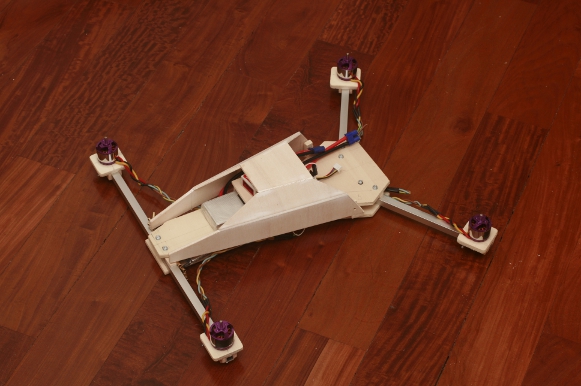
Inizio con il frame in mio possesso zmr 250
ha una forma di un rettangolo con :
Diagonale di 25 cm
lato più lungo 20
Quello più corto 16
apertura braccetti 140 gradiFile allegati -
-
La citazione di crisiinvolo mi sera molto interessante :
Entro certi limiti l'angolazioni dei bracci non influenzano il volo.
Neanche una diffente distanza tra motori anteriori e posteriori per esempio.
-L'importante è che il centro di gravità cade all'incrocio delle diagonali tra i motori.
-Stessa cosa la centralina di volo.
-Che il mezzo sia simmetrico rispetto ai 2 assi principali.
Se poi la centralina getisce una tabella con ogni motore e l'influenza dei comandi su esso si può ottimizzare anche la reazione per avere una reazione uguale sui 2 assi. Alrtimenti con grossi differenze potreste avere un asse più reattivo.
Da considerare che la classica configuraizone ad X ottimizza la ripartizione delle forze, un telaio del genere potrebbe creare altre forze che torcono i bracci, ma se ben dimenzionati e senza configurazionei estreme non dovrebbe essere un problema.Commenta
-
Frame tbs :File allegatiCommenta
-
-
Misure?Commenta
-
Del tbs nn le so spero che qualcun altro ci aiuti anche a me interesserebbeCommenta
-
domanda:
ma è sicuro che il centro di gravità influenzi il buon volo del modello? cioè, anche se il multirotore è sbilanciato (nei casi estremi in cui gli angoli non lo permettano oppure carichi particolari) teoricamente può influenzare l'efficienza..ma dovrebbe essere in grado di compensare spingendo diversamente sui vari motori. o sbaglio? (dalle prove che ho fatto fin ora non ho visto grandissime differenze sbilanciando il modello)
caso diverso se la centralina viene montata al di fuori del centro geometrico, o se non sa quale configurazione abbia il frame e quindi non sa come e quanto spingere per bilanciare (con una multiwii e un frame a V sono impazzito per fargli capire il tipo di frame)Commenta
-
Nell'immagine indica " centre of thrust" una diagonale diretta tra centro del motore e frame....ma il momento meccanico non dovrebbe essere applicato sull'attacco del braccio sul frame?Originariamente inviato da volanelmiocielo Visualizza il messaggioCommenta
-
Il 'Woody' (450 in realtà ancora in costruzione)
Quadrelli 10 x 10, compensato, colla, qualche vite, biadesivo, fascette. Appena sotto il kg, eliche e batteria comprese (ma manca ancora qualche cosa)...ho letto alcune cose scritte da Blade e il telaio forse è un po' sovradimensionato...
Chissà come volerà....se volerà..
Commenta
-
Il centro di gravità lo decidi in base al bilanciamento dei pesi, il centro di spinta lo decidi con il mixer, se i 2 centri coincidono il multi vola bene senza dover continuare a correggere, e si comporterà bene in voloOriginariamente inviato da Ch3ch2oh Visualizza il messaggio Sant'Ilario! °L°
Sant'Ilario! °L°Commenta
-
misure del TBF e del TBF pro grazie a Rodolfo.Originariamente inviato da volanelmiocielo Visualizza il messaggio
A cui ho aggiunto le matrici di posizione motori per il naza nel caso si volesse fare i fini.File x Dimensionamento multirotori http://www.baronerosso.it/forum/4304186-post101.html
Manuali Ita DJI
https://dl.dropboxusercontent.com/u/...0DJI%20ita.zipCommenta
-
Quello che vorrei capire ci sono quad che con il centro dei motori formano un quadrAto altri un rettangolo altri un trapezio come il tbs x nn parlare le varie forme dei esacotteri ......quello che mi chiedevo c'è una logica in tutto ciò o si prova e come va Và
si è cominciato con un quadrato poi frame ad H che forma un rettangolo, ora sto rettangolo quanto lo posso far lungo ??
E tutta una questione di centro di gravità ??Commenta
Commenta